***この固定ページでは、連載『切り替えの物語 — AIとの対話から生まれた統合理論』で扱った内容の一部分をを学術的な形でまとめた小論文2を掲載しています***
📘 論文2:タイトル
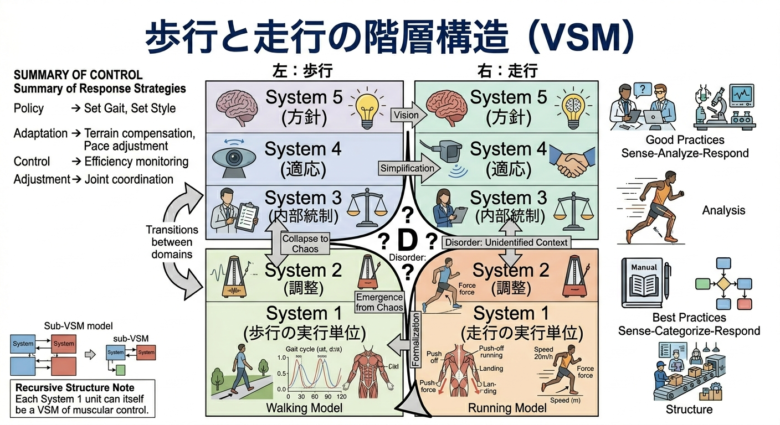
VSM と階層的再編成:歩行—走行切り替えにおける階層構造の動的変化
要旨
歩行—走行切り替えは、単なる速度閾値ではなく、階層構造の再編成を伴う自己組織化プロセスである。本稿では、Viable System Model(VSM)を用いて、切り替え時に生じる「階層のゆるみ」「制約の重なり」「最短経路的再編成」を説明する。変動性(Var⊥)の増大は、階層構造を再構築するための自由度として働き、新しい運動様式(走行)への移行を可能にする。本枠組みは、身体運動だけでなく、組織変革や認知システムにも適用可能である。
1. 序論
歩行—走行切り替えは、協調構造と制御構造が質的に変化する現象である。従来の研究はエネルギー効率や力学的閾値に注目してきたが、切り替え時に生じる「階層構造の再編成」は十分に説明されていない。本稿では、VSM(Viable System Model)を用いて、切り替え時に階層がどのようにゆるみ、再編成されるかを明らかにする。
2. VSM の概要:階層と自律性のモデル
VSM は、生存可能なシステムが安定性を維持するための階層構造を示すモデルである。
System 1:実行単位
System 2:調整
System 3:内部統制
System 4:適応
System 5:方針・アイデンティティ
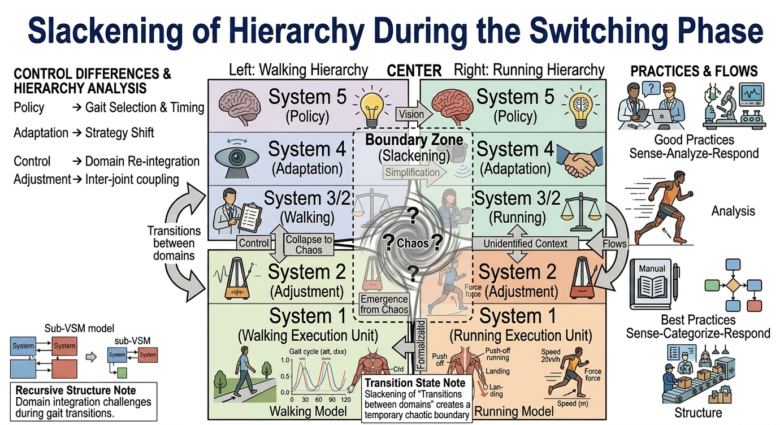
歩行と走行は、それぞれ異なる階層構造を持つ「秩序」である。 その違いを Figure 5 に示す。
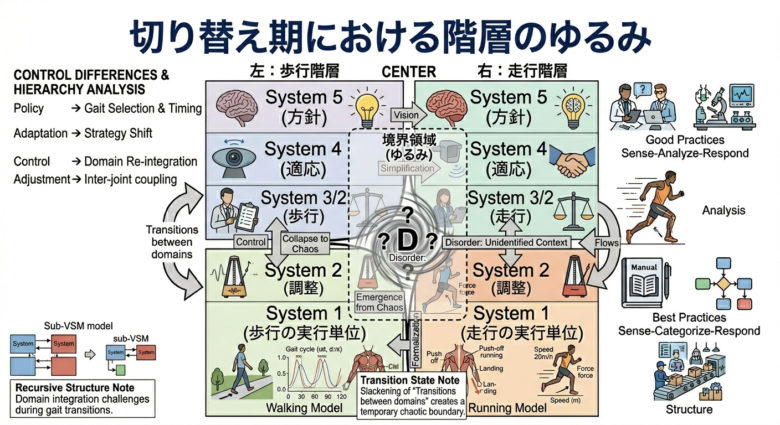
3. 切り替え時に起きる階層のゆるみ
歩行から走行への移行期には、歩行と走行の制約が同時に作用する。 この「制約の重なり」により、
・System 2(調整)が過負荷になる
・System 3(内部統制)が揺らぐ
・System 4(探索)が活性化する
という現象が生じ、階層構造が一時的に「ゆるむ」。 この状態を Figure 6 に示す。
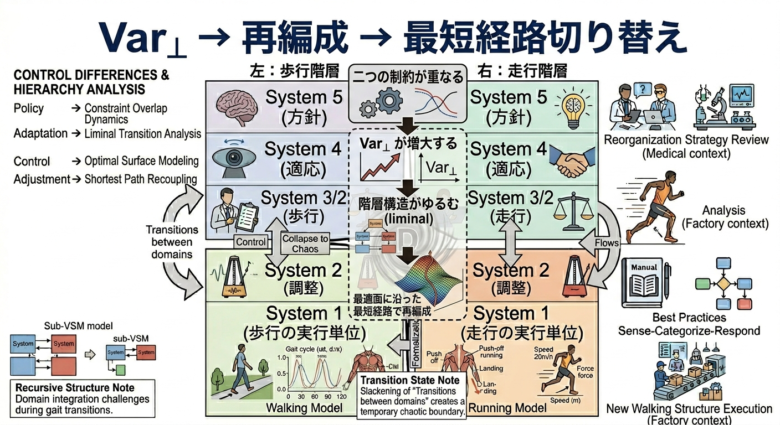
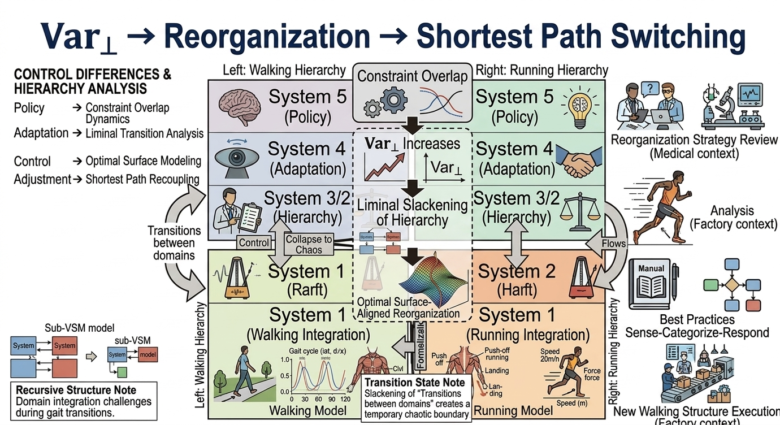
4. 変動性(Var⊥)が階層再編成の“梃子”になる
制約が重なると、タスク本質方向の直交補空間における変動性(Var⊥)が増大する。 この変動性は、階層構造を再編成するための自由度として働き、 新しい秩序(走行)への移行を可能にする。
5. 最短経路的な切り替え
階層構造がゆるむと、システムは制約幾何学における「最適面」に沿って最短経路で切り替える。 このプロセス全体を Figure 7 にまとめる。
6. 結論
VSM は、歩行—走行切り替えを「階層構造の動的再編成」として理解するための強力な枠組みを提供する。本枠組みは、SCAN 理論や制約幾何学とも整合し、身体運動に限らず、組織変革や認知モード切り替えなど多様な現象に一般化可能である。
📗 付録A:関連文献ガイド(VSM × 階層的再編成)
本付録では、VSM、階層的再編成、モード切り替えに関連する文献を、読むべき箇所とともに整理する。
A-1. Stafford Beer の VSM 原典
(1) Brain of the Firm(1972 / 1981)
読むべき箇所: 第6〜9章(System 1〜5)
ポイント:VSM の基本構造が最も明確に説明されている
歩行と走行を「別の階層構造」として扱う基盤となる
(2) The Heart of Enterprise(1979)
読むべき箇所: Part II(Recursion)
ポイント:再帰性(recursion)の概念が重要
階層構造の入れ子構造を理解するための基礎
(3) Diagnosing the System for Organizations(1985)
読むべき箇所: 第3章(System 2 と 3)
ポイント:切り替え時に System 2 が過負荷になる理由が理解できる
Figure 6 の「ゆるみ」と対応
A-2. 階層的再編成・モード切り替えの理論
(4) Kelso, Dynamic Patterns(1995)
読むべき箇所: 第2章(相転移と協調)
ポイント:モード切り替えの相転移的性質を理解する基礎
(5) Gelfand & Latash(1998–2002)UCM 仮説
読むべき箇所: UCM の定義と“許容される揺らぎ”
ポイント:Var⊥ が再編成の“梃子”になる理由を補強
A-3. 組織変革との接続
(6) Galbraith, Designing Organizations(2002)
読むべき箇所: マトリックス構造の章
ポイント:階層型 → マトリックス型の移行が「制約の重なり」によって起きる
VSM の System 2 過負荷と整合
📘 付録B:数学的定式化
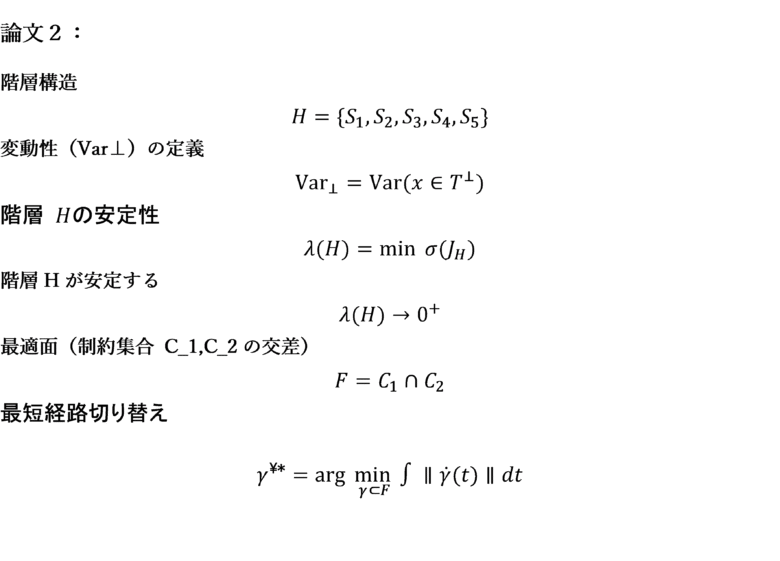
B-1. 再帰的階層構造
階層 Hは再帰的に
![]() で構成され、各 S_iは再び階層構造を持つ。
で構成され、各 S_iは再び階層構造を持つ。
参考文献: Beer(1979)、Baas(1994)
B-2. 変動性(Var⊥)の定義
タスク本質方向を張る部分空間 Tに対し、 その直交補空間 T^⊥における分散を
![]() と定義する。
と定義する。
参考文献: Scholz & Schöner(1999)、Latash(2002)
B-3. 階層のゆるみ(安定性の低下)
階層 Hの安定性を
![]() とすると、切り替え期には
とすると、切り替え期には
![]() となる。
となる。
参考文献: Strogatz(1994)、Kelso(1995)
B-4. 最適面と最短経路切り替え
制約集合 C_1,C_2の交差
![]() を「最適面」と呼ぶ。
を「最適面」と呼ぶ。
切り替えは
 で与えられる。
で与えられる。
参考文献: Rockafellar(1970)、Todorov(2004)
📙 付録C:読解に必要な数学的背景
C-1. 線形代数(固有値・部分空間)
必要な理由:
・Var⊥ の定義
・階層の安定性
・制約集合の幾何学
参考書:
斎藤正彦『線形代数入門』
Strang『Linear Algebra and Its Applications』
C-2. 非線形力学系(安定性・相転移)
必要な理由:
・階層のゆるみの理解
・モード切り替えの相転移的性質
参考書:
ストロガッツ『非線形ダイナミクスとカオス』
Kelso『Dynamic Patterns』
C-3. 最適化・凸解析
必要な理由:
・最適面の理解
・最短経路切り替えの定式化
参考書:
Boyd & Vandenberghe『Convex Optimization』
Rockafellar『Convex Analysis』
📘 論文2:VSM と階層的再編成:歩行—走行切り替えにおける階層構造の動的変化(英語版、Appendix A,Bは省略)
Title
VSM and Hierarchical Reorganization in the Walk–Run Transition
Abstract
The transition from walking to running is not merely a threshold phenomenon but a dynamic reorganization of hierarchical control structures. Using the Viable System Model (VSM), this paper explains how overlapping constraints destabilize the existing hierarchy, increase task-relevant variability (Var⊥), and enable a shortest-path reorganization toward a new locomotor mode. The proposed framework integrates VSM with constraint geometry and SCAN theory, offering a unified account of mode switching applicable to motor behavior, organizational change, and cognitive systems.
1. Introduction
The walk–run transition involves a qualitative shift in coordination and control. Traditional explanations emphasize energetic thresholds, but they overlook the hierarchical reorganization occurring during the transition. This paper applies the Viable System Model (VSM) to clarify how the control hierarchy loosens and reorganizes during mode switching.
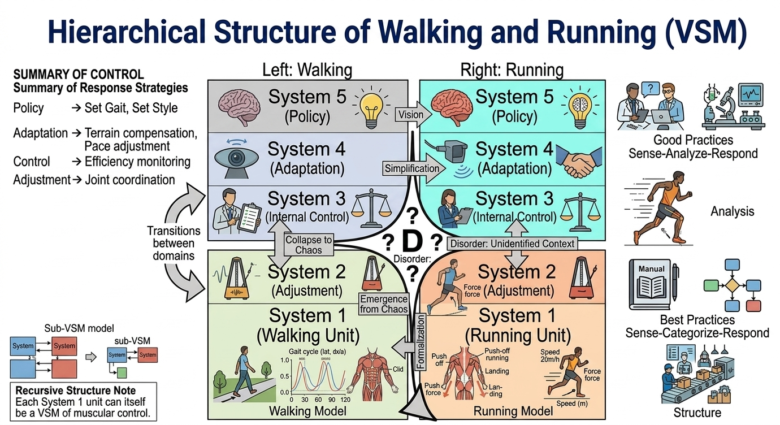
2. Overview of the Viable System Model (VSM)
VSM describes how viable systems maintain stability through a layered structure:
System 1: operational units
System 2: coordination
System 3: internal regulation
System 4: adaptation
System 5: policy and identity
Walking and running correspond to distinct hierarchical organizations. This structural difference is illustrated in Figure 5.
3. Hierarchical Loosening During the Transition
During the walk–run transition, walking and running constraints overlap. This dual constraint load destabilizes System 2 and System 3, activating System 4 and loosening the hierarchy.
This transient “liminal” state is shown in Figure 6.
4. Task-Relevant Variability (Var⊥) as a Lever for Reorganization
When constraints overlap, task-relevant variability increases in the orthogonal complement of the task subspace. This variability (Var⊥) provides the degrees of freedom necessary for reorganizing the hierarchy toward running.
5. Shortest-Path Switching Along the Optimal Face
Once loosened, the hierarchy reorganizes along the optimal face of the constraint geometry, producing a shortest-path transition.
The entire process is summarized in Figure 7.
6. Conclusion
VSM provides a powerful framework for understanding the walk–run transition as hierarchical reorganization, consistent with SCAN theory and constraint geometry. This approach generalizes to organizational change, cognitive mode switching, and other complex adaptive systems.
(注)本論文内で使用している数式の正しい表記は以下の通りです。
(リンク)
・「論文3:制約幾何学 × 最適面—SCAN・VSM・3D最小モデルを統合する切り替え理論」に進む。=>3-3)へ
・「論文1:SCAN 理論とモード切り替え: 歩行—走行切り替えのリミナルゾーン解釈」に戻る。 =>3-1)へ
・トピックス「1.ポールウオーキングの研究課題」に戻る。
(作成者)峯岸 瑛(みねぎし あきら:Akira MInegishi)
(公開日)2026年5月20日