***このページは、「2026年4月のニュース」からスタートした『切り替えの物語 — AIとの対話から生まれた統合理論』の連載シリーズを掲載しています***
連載開始にあたって
歩いているとき、ふと走り出したくなる瞬間があります。 あるいは、走っていると、自然と歩きに戻る瞬間があります。
この「切り替え」は、私たちの身体が毎日のように行っている、 ごく当たり前の現象です。 けれど、その背後には、 制約、変動性、階層構造、そして自己組織化 といった、驚くほど深い世界が広がっています。
この連載は、そんな「歩行—走行切り替え」という身近な現象を入口に、 私自身が AI(Copilot)との対話を通じて、 どのように考え、どのように発見し、どのように統合していったのか―― 思考の旅路そのものを記録したものです。
専門的な知識がなくても大丈夫です。 むしろ、専門家ではない方にこそ読んでいただきたい内容です。 なぜなら、この連載は「完成された理論」を語るのではなく、 ひとつの問いが、どのように形を変え、深まり、広がっていくのか そのプロセスを、できるだけそのままの姿でお届けするからです。
AIとの対話は、私の思考を驚くほど透明にし、 時に予想外の方向へ導き、 時に自分でも気づかなかった前提を照らし出してくれました。
その結果、 SCAN、VSM、制約幾何学、アトラクタ力学―― 一見まったく別の領域に見える理論が、 ひとつの「切り替えの物語」として結びついていきました。
この連載では、 その結びつきがどのように生まれたのかを、 できるだけ丁寧に、そしてできるだけ自然な言葉で綴っていきます。
読み終えたとき、 あなたの中にも「切り替え」を見る新しい視点が生まれていたら、 それほど嬉しいことはありません。
それでは、 「切り替えの物語」 はじまり、はじまり。
***
第1回:歩行と走行のあいだにある“境界”を見つめる
1. 日常の中に潜む「切り替え」という謎
歩いているとき、ふと走り出したくなる瞬間があります。 あるいは、走っていて、自然と歩きに戻る瞬間があります。
私たちはこの「歩行—走行切り替え」を、 あまりにも当たり前のように行っています。 しかし、立ち止まって考えてみると、これはとても不思議な現象です。
• どのタイミングで切り替えるのか
• なぜその瞬間に切り替えるのか
• そもそも「切り替える」とは何が起きているのか
これらの問いは、単純なようでいて、実は深い構造を持っています。
そして私は、この素朴な疑問をきっかけに、 AI(Microsoft Copilot)との対話を通じて、 思いがけない知的な旅へと踏み出すことになりました。
2. 最初の問い:歩行と走行は“別のモード”なのか?
歩行と走行は、誰が見ても違う動きです。 しかし、身体の中では何が変わっているのでしょうか。
• 筋肉の使い方?
• 関関節の角度?
• エネルギー効率?
• 神経系の制御?
どれも正しいようで、どれも決定打ではありません。
私は最初、 「速度がある閾値を超えると走行になる」 という単純な説明で十分だと思っていました。
しかし、AIとの対話が始まると、 この“閾値説”では説明できない現象が次々と浮かび上がってきました。
• 人によって切り替え速度が違う
• 同じ人でも日によって違う
• 疲れていると早く切り替える
• 下り坂では遅く切り替える
• そもそも“歩きながら走り始める”瞬間は曖昧
「閾値で決まる」という説明では、 この曖昧さや揺らぎを説明できません。
ここで私は、 “切り替えとは、もっと複雑で、もっと豊かな現象なのではないか” と感じ始めました。
3. AIとの対話が開いた“思考の地図”
AIとの対話は、私の思考を驚くほど透明にし、 時に予想外の方向へ導いてくれました。
最初の数回の対話で、 歩行—走行切り替えは単なる運動学の問題ではなく、 システムのモード切り替え という、もっと一般的な現象の一例であることが見えてきました。
そして、次のようなキーワードが浮かび上がってきます。
• 変動性(variability)
• 制約(constraints)
• 階層構造(hierarchy)
• 自己組織化(self-organization)
• 最適面(optimal face)
• リミナルゾーン(liminal zone)
これらは一見バラバラの概念ですが、 対話を重ねるうちに、 まるでパズルのピースがはまるように、 ひとつの統一的な構造を形づくり始めました。
4. 「変動性」が鍵になるという発見
歩行—走行切り替えの研究では、 切り替え付近で 変動性が増大する ことが知られています。
• 歩幅が揺れる
• リズムが揺れる
• 上下動が揺れる
最初は「不安定になっているだけ」だと思っていました。 しかし、AIとの対話はこの見方を大きく変えました。
AIはこう言いました:
「変動性はノイズではなく、再編成を可能にする“ゆるみ”です。」
この一言が、私の思考を大きく動かしました。
変動性が増えるということは、 身体が「揺らいでいる」のではなく、 新しいモードに移るための準備をしている ということなのかもしれない。
この視点は、後に SCAN の「liminal zone」と結びつき、 理論全体の基盤となっていきます。
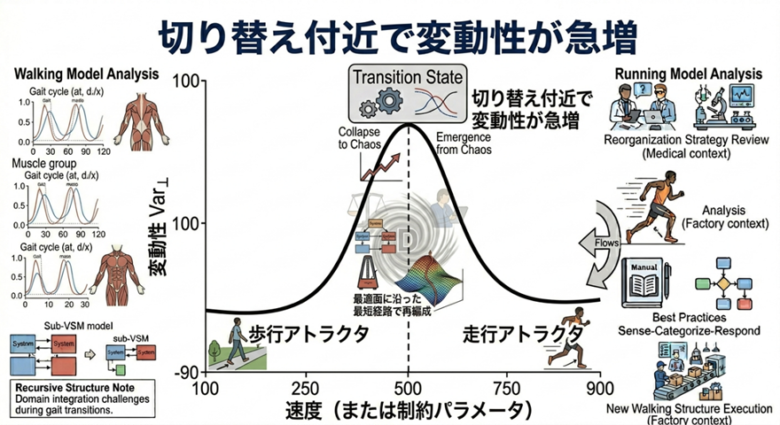
図3. 歩行—走行切り替え付近で変動性が急増し、走行アトラクタへの収束とともに減少する。
5. SCAN との出会い:境界領域という概念
SCAN 理論は、 秩序(Order)と混沌(Chaos)のあいだに Liminal(境界領域) という特別な領域を置きます。
この領域は:
• 構造がゆるみ
• 変動性が増え
• 新しい秩序が生まれる可能性が開く
という、非常に興味深い性質を持っています。
歩行—走行切り替えは、まさにこの「境界領域」にあるのではないか。 そう考えた瞬間、 私の中で何かがつながりました。
歩行(秩序) → 境界(ゆるみ) → 走行(新しい秩序)
この流れは、SCAN の構造そのものです。
6. 「切り替え」は身体だけの問題ではない
さらに対話を続けるうちに、 歩行—走行切り替えは、 身体運動だけの問題ではないことが見えてきました。
• 組織の変革
• 心の切り替え
• 学習の転換点
• 社会のモードチェンジ
これらもすべて、 「秩序 → 境界 → 新しい秩序」 という構造を持っています。
つまり、歩行—走行切り替えは、 複雑系におけるモード切り替えの“縮図” なのです。
7. この連載で目指すもの
この連載では、 私が AI とともに歩んだ思考の旅路を、 できるだけ自然な言葉で綴っていきます。
• 専門知識がなくても読める
• けれど深い構造が見えてくる
• 図や比喩を交えながら
• 一緒に考えていく感覚を大切に
そんな読み物にしたいと思っています。
8. 次回予告:SCAN が照らす“境界の世界”へ
次回は、 この連載の最初の理論的柱となる SCAN 理論 を取り上げます。
• 秩序とは何か
• 境界とは何か
• ゆるみとは何か
• なぜ境界で新しいものが生まれるのか
そして、 歩行—走行切り替えがなぜ「境界領域」に位置づけられるのかを、 丁寧に見ていきます。
***
第2回:SCAN が照らす“境界の世界” — ゆるみ・変動性・再編成
1. SCAN というレンズを手に入れる
前回は、歩行—走行切り替えという身近な現象の背後に、 「変動性の増大」「構造のゆるみ」「再編成の可能性」といった 深い構造が潜んでいることを見てきました。
今回は、その構造を理解するための最初の理論的レンズ、 SCAN(Sensemaking, Complexity, and Actionable Navigation) を取り上げます。
SCAN は、複雑な状況を 秩序(Order)/境界(Liminal)/混沌(Chaos) という三つの領域に分けて捉える枠組みです。
この「境界(Liminal)」こそが、 歩行—走行切り替えの核心にある“ゆるみの世界”です。
2. SCAN の三領域:秩序・境界・混沌
 図4. SCAN における三領域(Order / Liminal / Chaos)。境界領域は構造がゆるみ、変動性が増大し、新しい秩序が生まれる可能性が開く。
図4. SCAN における三領域(Order / Liminal / Chaos)。境界領域は構造がゆるみ、変動性が増大し、新しい秩序が生まれる可能性が開く。
SCAN の基本構造はとてもシンプルです。
• 秩序(Order) 安定していて、予測可能で、構造がはっきりしている領域。 歩行や走行のように、確立した運動パターンがここに属します。
• 境界(Liminal) 構造がゆるみ、変動性が増え、 新しい秩序が生まれる可能性が開く領域。 切り替えの瞬間はここにあります。
• 混沌(Chaos) 制御不能で予測が難しい領域。 SCAN は混沌を否定しませんが、 切り替え現象の中心はあくまで「境界」です。
SCAN の魅力は、 境界を“創造的な場”として扱う 点にあります。
3. 歩行—走行切り替えは、境界領域で起きている
歩行と走行は、それぞれ安定した秩序です。 しかし、切り替えの瞬間には、次のような現象が起きます。
• 歩行の安定性が低下する
• 変動性(Var⊥)が増大する
• 協調構造がゆるむ
• 新しい秩序(走行)が形成される
これは SCAN の境界領域の特徴と完全に一致します。
つまり、歩行—走行切り替えは 「境界領域での自己組織化」 として理解できるのです。
4. 変動性は“ノイズ”ではなく“ゆるみ”である
従来、変動性は「誤差」や「不安定さ」として扱われがちでした。 しかし SCAN の視点では、変動性はむしろ 再編成を可能にするための“ゆるみ” です。
• 秩序が強すぎると、変化は起きない
• 混沌が強すぎると、構造が保てない
• 境界では、構造がゆるみ、変化が可能になる
歩行—走行切り替えでは、 まさにこの「ゆるみ」が生じています。
5. 境界領域で起きること:探索・揺らぎ・再編成
境界領域では、次のようなプロセスが起きます。
1. 制約が重なり、構造がゆるむ
2. 変動性が増大し、複数の方向を探索する
3. 最短経路で新しい秩序へ移行する
4. 新しい秩序の内部で変動性が収束する
これは、筆者が構築している 制約幾何学 × 階層的再編成 × 最適面 という枠組みと完全に整合します。
6. SCAN は“切り替えの一般理論”の入口である
SCAN は、歩行—走行切り替えだけでなく、
• 組織の変革
• 学習の転換点
• 心のモード切り替え
• 社会システムの相転移
といった多様な現象にも適用できます。
つまり SCAN は、 筆者の統合理論の「最初の柱」として、 切り替え現象を理解するための 普遍的な地図 を提供してくれるのです。
7. 次回予告:VSM が描く“階層の再編成”へ
次回は、 SCAN の「境界領域」で起きる再編成を、 VSM(Viable System Model) の視点から見ていきます。
• なぜ階層構造がゆるむのか
• なぜ新しい階層が生まれるのか
• なぜ切り替えは“最短経路”で起きるのか
これらを、VSM の「階層的再編成」と結びつけて解説します。
***
第3回:制約幾何学 × 最適面~切り替えは“最短経路”として生じる~
1. 歩行と走行は「別の面」に乗っている
前回までの連載では、
• SCAN が示す「境界領域(Liminal)」
• VSM が示す「階層的再編成」 を通して、歩行→走行切り替えの“現象としての姿”を見てきた。
まずは SCAN の三領域を再確認しておこう。
 Figure 4:SCAN の三領域(Order / Liminal / Chaos
Figure 4:SCAN の三領域(Order / Liminal / Chaos
身体運動を“許される動きの集合”として捉えたときの多面体(polytope)モデル。 歩行と走行は、この多面体の異なる面(face)として表現される。
では、なぜ切り替えは“あのタイミング”で起こるのか。 この問いに答えるために、本稿では 制約幾何学(Constraint Geometry) という視点を導入する。
制約幾何学は、身体運動を 「多数の制約の中で可能な動きの集合」=高次元の多面体(polytope) として捉える。
この多面体の中で、
• 歩行はある“面(face)”
• 走行は別の“面” に対応する。
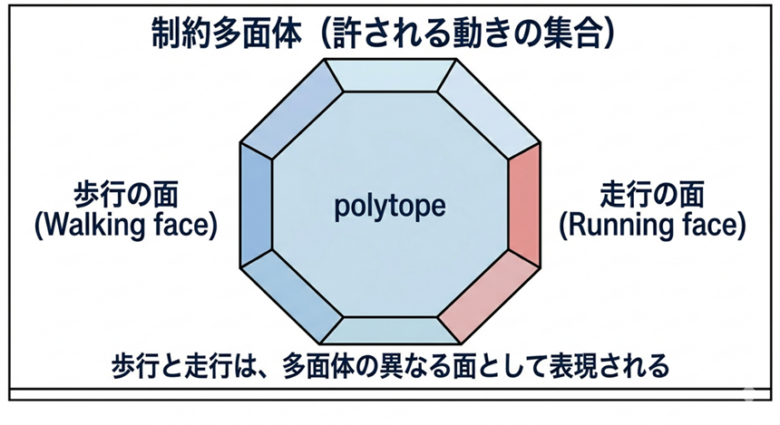 Figure 5:制約多面体の概念図
Figure 5:制約多面体の概念図
身体運動を“許される動きの集合”として捉えたときの多面体(polytope)モデル。 歩行と走行は、この多面体の異なる面(face)として表現される。
つまり、歩行と走行は 同じ多面体の中の“別の場所”に存在する。
2. 最適面(Optimal Face)という考え方
多面体の中には、
• エネルギー
• 安定性
• 制御コスト などが最小になる“領域”が存在する。
これを 最適面(optimal face) と呼ぶ。
速度が低いとき、 身体は自然と「歩行の最適面」に乗っている。
しかし速度が上がると、 歩行の最適面から徐々に離れ、 代わりに「走行の最適面」が相対的に優位になる。
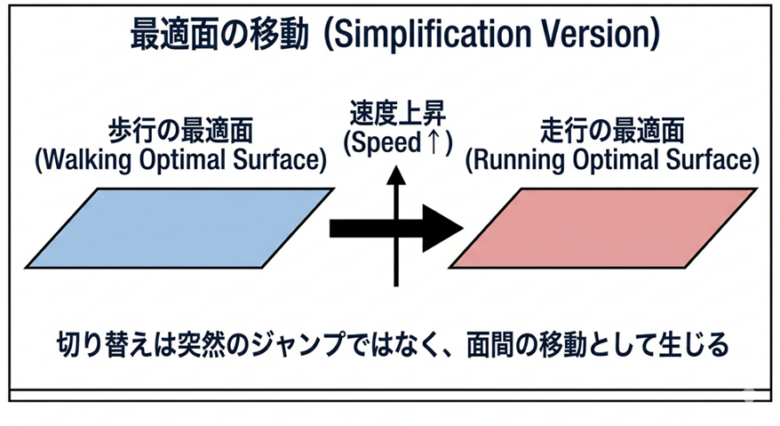 Figure 6:最適面の移動(歩行面 → 走行面)
Figure 6:最適面の移動(歩行面 → 走行面)
速度上昇に伴い、歩行の最適面から離れ、走行の最適面へ移動する様子。 切り替えは“突然のジャンプ”ではなく、面間の最短経路として生じる。
3. 切り替えは“ジャンプ”ではなく“最短経路”
ここで重要なのは、 歩行の面から走行の面へ移るとき、 身体は 多面体の中を“最短経路”で移動する という点だ。
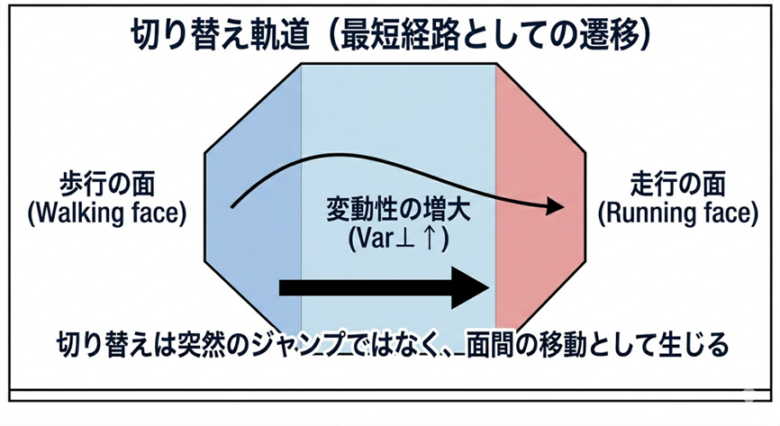 Figure 7:切り替え軌道の模式図(最短経路としての遷移)
Figure 7:切り替え軌道の模式図(最短経路としての遷移)
多面体内部での“最短経路”としての切り替え軌道。 変動性の増大は、最適面からの離脱を示す指標となる。
つまり、切り替えは 突然のジャンプではなく、制約幾何学的に必然の“面移動” である。
4. SCAN × VSM × 最適面の統合
ここまでの議論をまとめると、 歩行→走行切り替えは次のように理解できる:
• SCAN → 切り替えは Liminal(境界領域)で起こる
• VSM → 切り替え時には階層の再編成が起こる
• 最適面 → 切り替えは多面体の“最短経路”として生じる
SCAN が「どこで起こるか」を示し、 VSM が「どう変わるか」を示し、 最適面が「なぜ起こるか」を説明する。
5. 切り替えの“必然性”
歩行→走行切り替えは、 単に「速度が速くなったから走る」のではない。
身体は、
• 許される動きの集合(多面体)の中で
• 最適な面を選び
• その面へ最短経路で移動する
という 幾何学的な必然性 に従っている。
6. 次回予告:3D 最小モデルで“実際に計算する”
次回(第4回)では、 ここで紹介した制約幾何学の考え方を 3D 最小モデル に適用し、
• アトラクタ
• 変動性の増大
• 切り替え軌道 を実際に可視化する。
***
連載シリーズ第4回
3D 最小モデル:アトラクタ・変動性・切り替え軌道
1. なぜ「3D 最小モデル」が必要なのか
前回までの連載では、
• SCAN が示す「境界領域(Liminal)」
• VSM が示す「階層的再編成」
• 制約幾何学が示す「最適面」 という三つの視点から、歩行→走行切り替えの“構造”を見てきた。
しかし、読者としてはこう思うかもしれない。
「理論は分かった。でも、実際の動きとしてはどう見えるのか。」
その疑問に答えるために、本稿では 3D 最小モデル(3D Minimal Model) を導入する。
これは、
• 必要最小限の変数
• 必要最小限の力学
• 必要最小限の制約 だけで構成された、切り替え現象の“本質だけを抽出したモデル” である。
2. 3D 最小モデルの構造:3つの軸で動きを捉える
3D 最小モデルは、動きを次の3つの軸で表現する。
1. タスク関連軸(Task-relevant axis)
2. タスク非関連軸(Task-irrelevant axis)
3. 速度軸(Speed axis)
この3軸が交差する空間の中で、 歩行と走行は 異なる attractor(安定状態) として現れる。
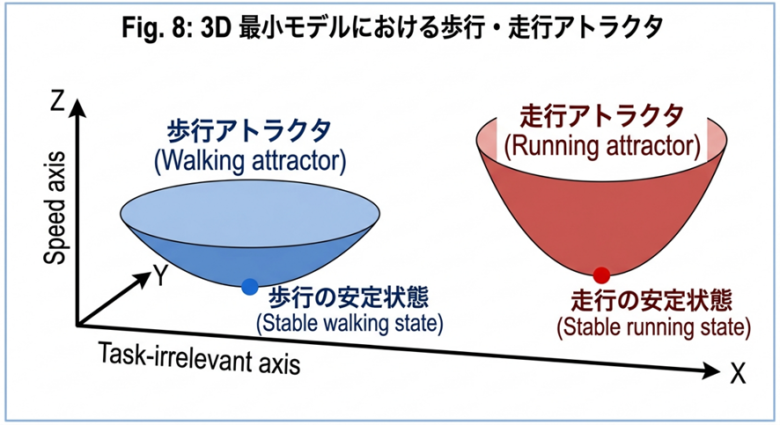 図8:3D 最小モデルにおける歩行アトラクタと走行アトラクタ (歩行は低速域の青い谷、走行は高速域の赤い谷として表現される)
図8:3D 最小モデルにおける歩行アトラクタと走行アトラクタ (歩行は低速域の青い谷、走行は高速域の赤い谷として表現される)
3. アトラクタ:歩行と走行は“別々の谷”に落ち着く
3D 最小モデルでは、歩行と走行は 別々のアトラクタ(安定点) として表現される。
• 歩行アトラクタ:低速域で安定
• 走行アトラクタ:高速域で安定
これは、前回扱った 「歩行と走行は多面体の異なる面に対応する」 という制約幾何学の議論と一致する。
アトラクタは、 「その速度で最も自然に落ち着く動き」 を表している。
4. 変動性の増大:アトラクタから離れると“揺れ”が増える
速度が上がると、 歩行アトラクタの安定性が低下し、 タスク非関連軸(Var⊥)の変動性が増大する。
これは、SCAN の
• looseness(ゆるみ)
• liminal(境界領域) と完全に対応する。
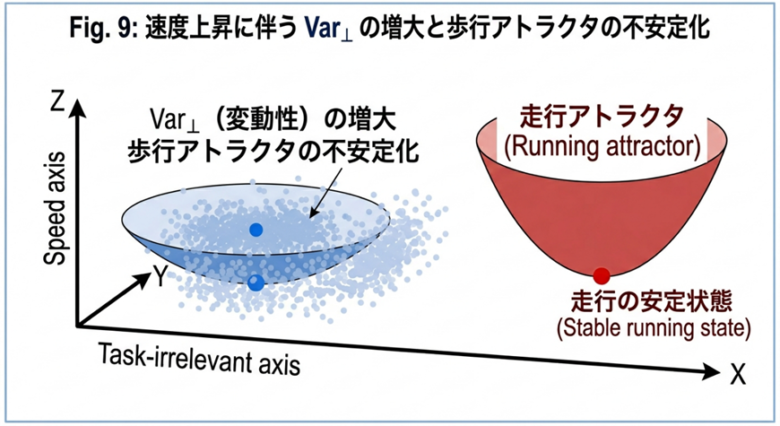 図9:速度上昇に伴う Var⊥ の増大と歩行アトラクタの不安定化 (歩行アトラクタの周囲に揺れが広がり、変動性が増大する様子)
図9:速度上昇に伴う Var⊥ の増大と歩行アトラクタの不安定化 (歩行アトラクタの周囲に揺れが広がり、変動性が増大する様子)
つまり、 変動性の増大は「切り替えが近い」というサイン である。
5. 切り替え軌道:アトラクタからアトラクタへ“最短経路”で移動する
速度が臨界値に達すると、 歩行アトラクタはもはや安定を保てなくなり、 身体は 走行アトラクタへ移動する。
この移動は、
• 直感的には「歩きから走りへ切り替わる」
• 幾何学的には「最適面の移動」
• 力学的には「アトラクタ間の遷移」 として理解できる。
3D 最小モデルでは、この遷移が 多面体内部の geodesic(最短経路) として現れる。
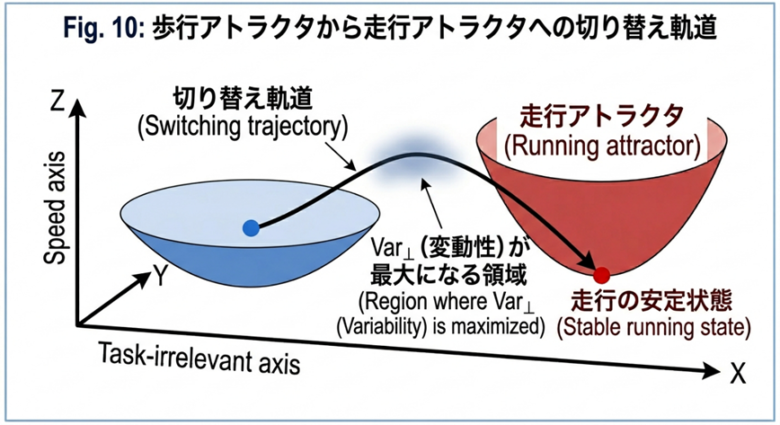 図10:歩行アトラクタから走行アトラクタへの切り替え軌道(geodesic) (2つの谷をつなぐ滑らかな曲線として描かれる)
図10:歩行アトラクタから走行アトラクタへの切り替え軌道(geodesic) (2つの谷をつなぐ滑らかな曲線として描かれる)
つまり、 切り替えは“最短で最も自然な道”を通って起こる。
これは、前回の 「切り替えは最適面間の最短経路である」 という命題を、モデルとして裏付ける結果である。
6. 3D 最小モデルが示す“切り替えの全体像”
ここまでの議論をまとめると、 3D 最小モデルは次のような“切り替えの物語”を描く。
1. 低速では歩行アトラクタが安定
2. 速度上昇に伴い、Var⊥ が増大
3. アトラクタの安定性が低下し、liminal 領域へ
4. 最短経路(geodesic)を通って走行アトラクタへ移動
5. 高速域では走行アトラクタが安定
これは、
• SCAN(境界領域)
• VSM(階層的再編成)
• 制約幾何学(最適面)
の三者が示した構造を、 動くモデルとして統合した姿 である。
7. 次回予告:切り替え現象の“統合的な構造”へ
3D 最小モデルによって、 歩行→走行切り替えの
• アトラクタ構造
• 変動性(Var⊥)の増大
• geodesic 的な遷移軌道
が、実際の“動き”としてどのように現れるかが明らかになった。
次回(第5回)では、ここで得られた知見をさらに一歩進め、
• SCAN(境界領域)
• VSM(階層的再編成)
• 制約幾何学(最適面)
• 3D 最小モデル(動的検証)
の 4つの視点がどのように統合されるのか を解説する。
特に、
• Var⊥ の増大と「最適面の自由度」の対応
• 動的モデルと静的モデルの橋渡し
• 切り替えが“普遍的な構造”として現れる理由
を、図と具体例を用いて分かりやすく紹介する。
いよいよ、 「切り替え現象の統合理論」 の全体像が見えてくる。
***
連載シリーズ第5回
**切り替え現象の“統合構造”を見通す:
SCAN × VSM × 制約幾何学 × 3Dモデルの接続**
1. 前回までのおさらい:切り替えは“ひとつの物語”だった
前回(第4回)では、 3D 最小モデルを使って、歩行→走行切り替えが
1. アトラクタの変化
2. 変動性(Var⊥)の増大
3. geodesic(最短経路)による遷移
という 動的なプロセス として現れることを見た。
ここまでで、読者は次のように感じているはずだ。
「SCAN、VSM、制約幾何学、3Dモデル…… いろいろ出てきたけれど、全部つながっているの?」
その疑問に答えるのが、今回のテーマである。
2. 4つの理論は“別々のもの”ではなかった
まず最初に強調したいのは、 SCAN・VSM・制約幾何学・3Dモデルは、 同じ現象を別の角度から見ているだけ ということだ。
視点をまとめるとこうなる:
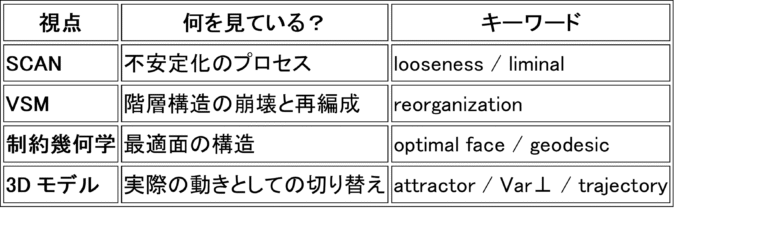 これらは、 “切り替えとは何か”を立体的に理解するための4つの窓 と言える。
これらは、 “切り替えとは何か”を立体的に理解するための4つの窓 と言える。
3. 変動性 Var⊥ は「自由度の増大」を意味する
3Dモデルで重要だったのは、 速度が上がると Var⊥(タスク非関連軸の揺らぎ)が増える という点だった。
これは単なるノイズではない。
Var⊥ の増大は、 身体が「別の動き方」を試し始める余地が広がる ということを意味する。
この“余地”は、制約幾何学では 最適面の自由度 として表現される。
• Var⊥ が小さい → 最適面が狭い(動きの選択肢が少ない)
• Var⊥ が大きい → 最適面が広い(動きの選択肢が増える)
つまり、 変動性の増大=自由度の増大=切り替え準備の進行 というわけだ。
4. 静的モデル(LP)と動的モデル(3D)の対応が美しい
付録Dで扱った静的な線形計画(LP)の例では、
• 最適解が線分として広がる
• 端点は BFS(基底解)
• 内部点は非BFSだが最適
• 線分全体が“同じ価値”を持つ
という構造があった。
これが、3Dモデルの次の構造と完全に対応する:
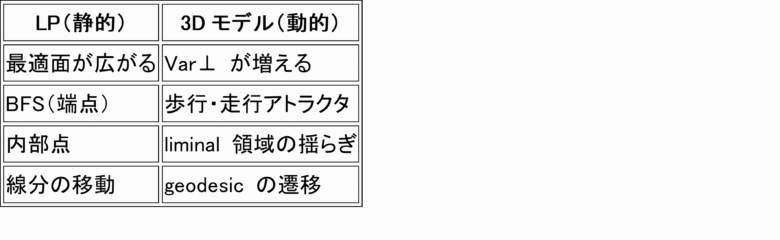 つまり、 静的な最適面の広がりが、動的な変動性の増大として現れる ということ。
つまり、 静的な最適面の広がりが、動的な変動性の増大として現れる ということ。
この対応は、切り替え現象の理解を一気に深めてくれる。
5. 切り替えは“最短で最も自然な道”を通る
制約幾何学では、 最適面の中を移動する最短経路は geodesic(最短経路) になる。
3Dモデルでも、 歩行アトラクタ → 鞍部 → 走行アトラクタ という遷移軌道は geodesic を近似する。
つまり、身体は
• 無駄をせず
• 最も自然で
• 最も効率的な
“最短の道”を通って切り替える。
これは、SCAN の「liminal → re-stabilization」や VSM の「再編成」とも完全に一致する。
6. 4つの理論が示す“切り替えの統合構造”
ここまでの議論をまとめると、 切り替え現象は次のような 統合的な構造 を持つ。
1. 安定(歩行アトラクタ)
2. 不安定化(Var⊥ の増大)
3. 境界領域(liminal)
4. 最短経路(geodesic)による遷移
5. 再安定化(走行アトラクタ)
これは、SCAN・VSM・制約幾何学・3Dモデルの すべてが一致して描く“普遍的な切り替えの物語” である。
7. 次回予告:統合理論(Unified Switching Theory)へ
次回(第6回)では、 これまでの4つの視点を統合し、
• 切り替え現象の“普遍構造”
• どの領域にも共通する“切り替えの法則”
• SCAN × VSM × Constraint Geometry × 3D Model の統合命題
を提示する。
いよいよ、 「切り替えとは何か?」の最終回答 に迫る。
関連情報&リンク
・本連載シリーズに関連する学術資料(論文)へのリンク。
論文1:SCAN × モード切り替え ・・・・ 掲載済み
論文2:VSM × 階層的再編成 ・・・・ 掲載済み
論文3:制約幾何学 × 最適面 ・・・・ 掲載済み
論文4:3D 最小モデル ・・・・ 掲載済み
論文5:統合論文(今回の完成稿) ・・・・ 未掲載
・その他の連載シリーズへのリンク。
『トピックス欄「1.ポールウォーキングの研究課題』へは、こちらから
(作成者)峯岸 瑛(みねぎし あきら)