Paper B
Standard Pole Walking: Biomechanics, Stability, and System Dynamics ~
A hierarchical and constraint based analysis of SPW as a designed movement system ~
Abstract
Standard Pole Walking (SPW), a Japanese method characterized by the use of nearly vertical poles, provides a unique intervention for reorganizing human gait. Unlike Nordic Walking, which emphasizes propulsion, SPW focuses on stability, sensory clarity, and system level reconfiguration. This paper analyzes SPW through the lens of biomechanics, constraint based optimization, attractor dynamics, and hierarchical control. We demonstrate that SPW modifies the stability landscape, reduces unnecessary variability, reshapes liminal zones, and influences all three layers of gait control—mechanical, coordinative, and cognitive–perceptual. The analysis positions SPW as a deliberately designed movement system that leverages the natural logic of human locomotion.
1. Introduction
Standard Pole Walking (SPW) is a Japanese method of assisted locomotion that employs vertical poles to enhance stability and reorganize gait. Although superficially similar to Nordic Walking (NW), SPW differs fundamentally in purpose, mechanics, and system level effects.
Whereas NW uses poles for propulsion, SPW uses poles for stability and constraint design.
This paper argues that SPW is best understood as a designed movement system that:
①modifies biomechanical constraints,
②reshapes attractor stability,
③structures variability,
④influences hierarchical control,
⑤and expands the safe operational range of walking.
We analyze SPW using the unified theoretical framework established in Paper A.2. Background
2.1 Biomechanics of Human Walking
Human walking relies on:
・inverted pendulum mechanics,
・center of mass (COM) control,
・ground reaction forces (GRFs),
・passive dynamics.
Stability depends on the ability to maintain COM within a controllable region relative to the base of support.
2.2 Stability and COM Control
Instability arises when:
・lateral sway increases,
・COM excursions exceed safe margins,
・sensory cues become ambiguous.
SPW directly targets these factors.
2.3 Variability and Coordination
Healthy gait exhibits structured variability. Excessive variability indicates instability; insufficient variability indicates rigidity.
SPW aims to reduce unnecessary variability while preserving functional exploration.
3. SPW as a Constraint Design Intervention
SPW modifies the locomotor system not by adding force but by changing constraints.
 This alters the feasible solution space for gait.
This alters the feasible solution space for gait.
4. Biomechanical Analysis
4.1 COM Stabilization
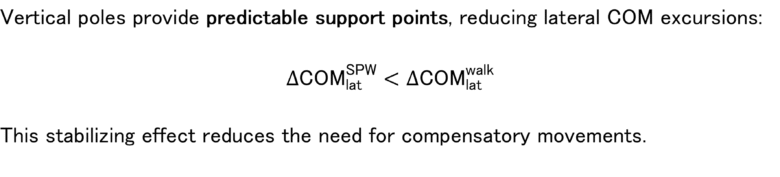
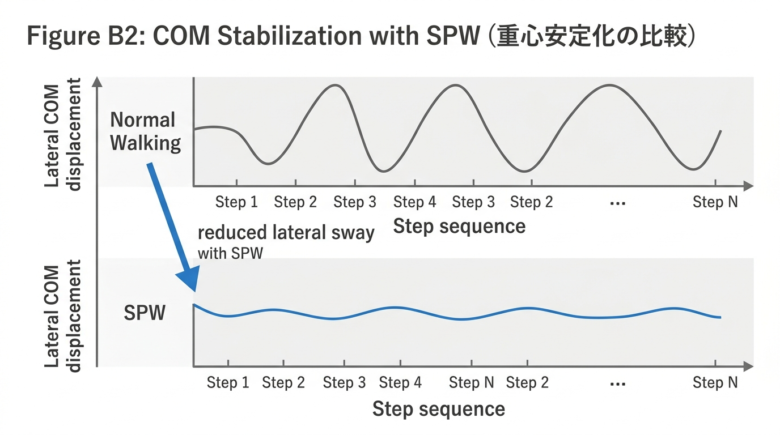 Figure B2. Reduction of lateral center of mass (COM) sway during SPW.
Figure B2. Reduction of lateral center of mass (COM) sway during SPW.
The figure compares lateral COM trajectories during normal walking and SPW. Normal walking exhibits larger side to side COM excursions, reflecting the need for continuous balance corrections. SPW reduces these excursions by providing additional vertical support and stabilizing the trunk, resulting in a smoother and more predictable COM path. This mechanical stabilization contributes to reduced variability and improved balance confidence.
4.2 Joint Loading
 4.3 Ground Reaction Forces
4.3 Ground Reaction Forces
5. System Dynamics Perspective
5.1 Attractor Shaping
SPW modifies the stability landscape:
・walking attractor becomes deeper,
・liminal zone becomes narrower,
・premature transitions are delayed.
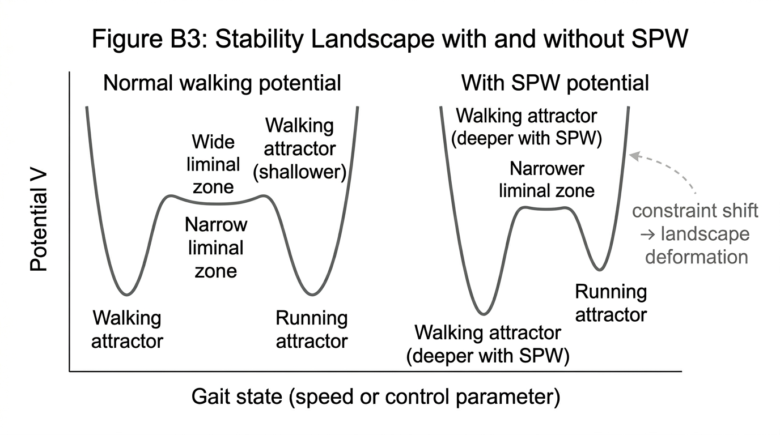 Figure B3. Modification of the stability landscape by SPW.
Figure B3. Modification of the stability landscape by SPW.
This diagram illustrates how SPW reshapes the attractor landscape of human gait. In normal walking, the walking attractor is moderately deep and the liminal zone between walking and running is relatively wide. With SPW, the walking attractor becomes deeper and more stable, while the liminal zone narrows. This shift explains why SPW delays premature transitions and expands the safe operational range of walking speeds.
5.2 Variability Modulation
 This creates a more stable attractor.
This creates a more stable attractor.
5.3 Liminal Zone Reshaping
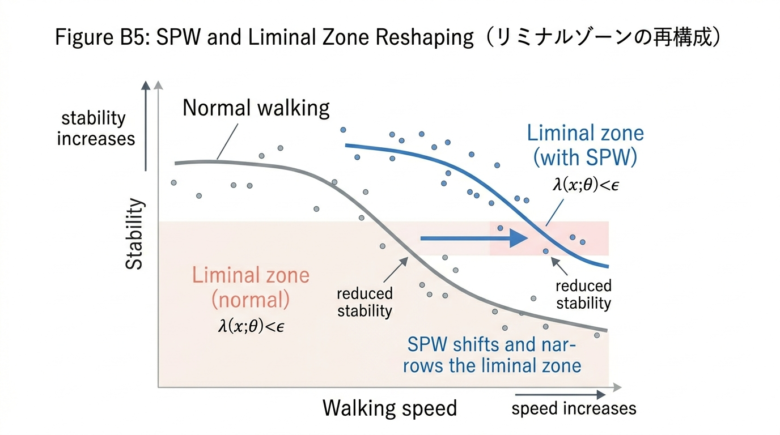 Figure B5. SPW induced reshaping of the liminal zone across walking speeds.
Figure B5. SPW induced reshaping of the liminal zone across walking speeds.
The figure shows stability as a function of walking speed for normal walking and SPW. In normal walking, stability decreases with speed, and a broad liminal zone emerges where neither walking nor running is fully stable. SPW elevates overall stability and shifts the liminal zone to higher speeds while narrowing its width. This demonstrates that SPW increases the robustness of walking and reduces the likelihood of instability driven transitions.
6. Hierarchical Control Analysis
SPW influences all three layers of gait control.
6.1 Low Level (Mechanical Layer)
Effects include:
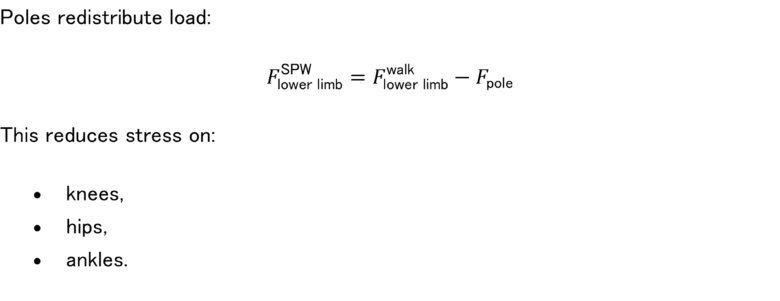
・reduced joint loading,
・stabilized COM trajectory,
・additional support points.
These changes reduce mechanical noise.
6.2 Mid Level (Coordination Layer)
SPW enhances:
・rhythm consistency,
・left–right alternation,
・step timing regularity.

6.3 High Level (Cognitive–Perceptual Layer)
SPW reduces:
・fear of falling,
・cognitive load,
・perceptual ambiguity.
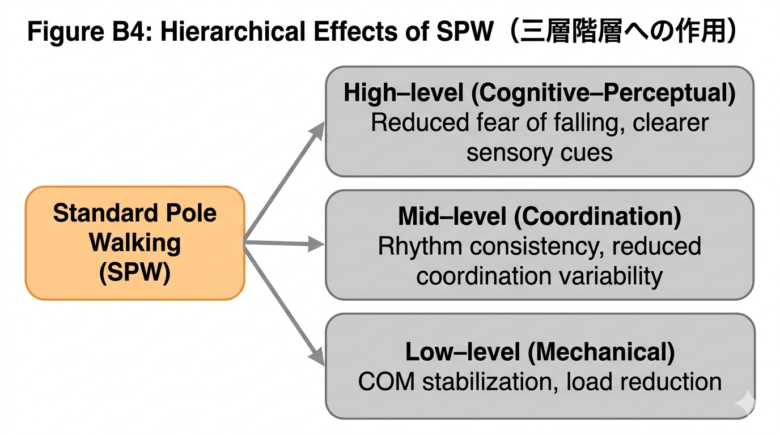 Figure B4. Hierarchical effects of SPW across mechanical, coordinative, and cognitive–perceptual layers.
Figure B4. Hierarchical effects of SPW across mechanical, coordinative, and cognitive–perceptual layers.
Legend. SPW influences all three layers of gait control. At the low level mechanical layer, SPW stabilizes the COM and reduces joint loading. At the mid level coordination layer, it enhances rhythm consistency and decreases unnecessary coordination variability. At the high level cognitive–perceptual layer, SPW reduces fear of falling and clarifies sensory cues, lowering cognitive load. Together, these effects demonstrate that SPW functions as a multi layer intervention rather than a purely mechanical aid.
7.Comparison with Nordic Walking
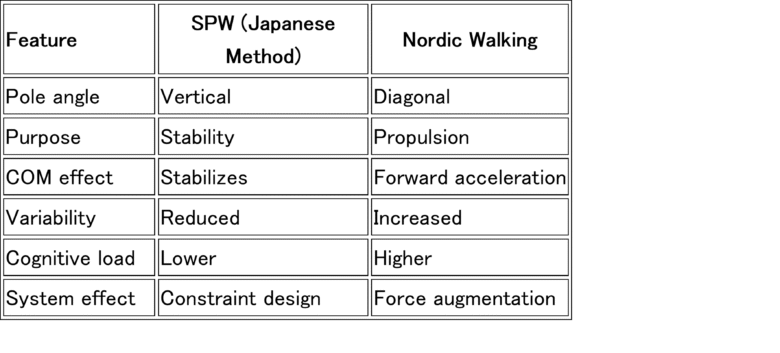
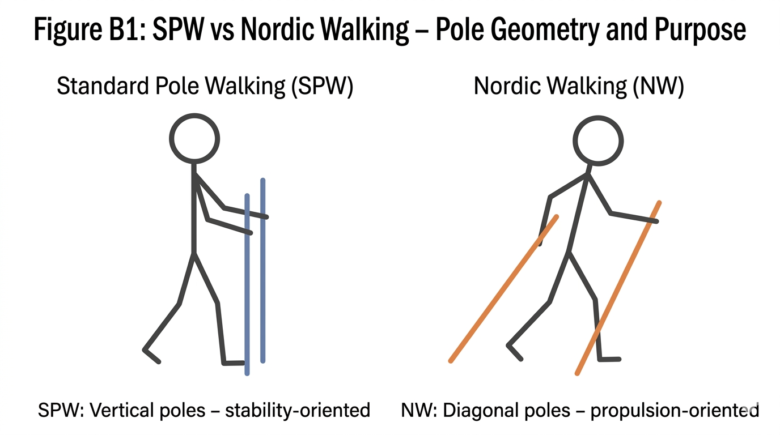 Figure B1. Comparison of pole geometry and functional purpose in SPW and Nordic Walking.
Figure B1. Comparison of pole geometry and functional purpose in SPW and Nordic Walking.
This figure contrasts the pole configurations and functional intentions of Standard Pole Walking (SPW) and Nordic Walking (NW). SPW employs nearly vertical poles positioned close to the body, providing stable support points that enhance balance and reduce mechanical noise. In contrast, NW uses diagonally oriented poles to generate propulsion and increase forward acceleration. The comparison highlights that SPW is a stability oriented constraint design intervention, whereas NW is a force augmentation technique.
 SPW is fundamentally a stability oriented system, not a propulsion technique.
SPW is fundamentally a stability oriented system, not a propulsion technique.
8. Applications
8.1 Rehabilitation
SPW is effective for:
・balance disorders,
・post stroke gait training,
・elderly fall prevention.
8.2 Clinical Gait Training
SPW provides:
・structured variability,
・predictable sensory cues,
・reduced mechanical load.
8.3 Everyday Mobility
SPW expands the safe walking range for:
・older adults,
・individuals with reduced balance,
・those recovering from injury.
9. Conclusion
Standard Pole Walking is a designed movement system that reorganizes human gait through constraint modification, stability enhancement, and hierarchical influence. By reshaping the stability landscape, structuring variability, and clarifying perceptual cues, SPW provides a powerful tool for improving gait safety and efficiency.
This analysis demonstrates how the unified theory developed in Paper A can be applied to real world interventions, revealing SPW as a practical embodiment of the principles of human locomotion.
*** Link ***
→ Paper A
→ Paper A : Appendix (A~D)
→ TOPICS – Key Themes and Research Directions in SPW —
→ English Article Series 1
→ English Gateway Page