安定性・変動性・切り替えの統合理論を支える補足資料
概要とナビゲーション
本付録では、論文Aで提示した「安定性・変動性・切り替えの統合理論」を支える 数学的基盤・パラメータ定義・図版・SCAN モデルを体系的にまとめる。 読者が 数学的理解 → モデル再現性 → 視覚的理解 → 行動レベルの統合 という流れで読み進められるように構成している。
付録の構成(Appendix Structure)
Appendix A — 数学的基礎と証明(Mathematical Foundations and Proofs)
本付録では、論文Aの理論を支える数学的結果を導出する:
・安定性=ポテンシャル曲率
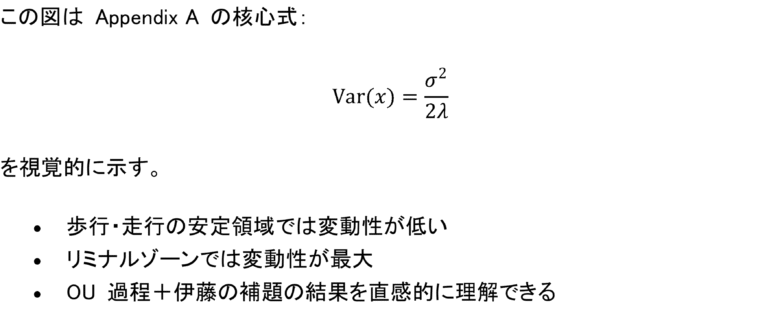
・変動性=安定性の逆数(OU 過程+伊藤の補題)
・リミナルゾーン(鞍部)の存在
・ノイズ駆動の切り替え確率
・伊藤の補題の直感的説明
・OU 過程と伊藤の補題の統合による変動性公式の導出
理論の数学的バックボーンを提供する章。
Appendix B — パラメータ定義(Parameter Definitions)
モデルおよびシミュレーションで使用した すべての変数・パラメータ・初期条件を整理する:
・状態変数
・力学パラメータ
・ノイズ・変動性パラメータ
・再現性のための総合表
読者がモデルを再現・拡張できるように透明性を確保する章。
Appendix C — 追加図版(Additional Diagrams)
数学的結果を視覚的に補強する図を掲載:
・Figure C1:安定性地形(Walking–Liminal–Running)
・Figure C2:変動性曲線(安定性の逆数)
・Figure C3:切り替え確率と変動性の関係
Appendix D — SCAN の形式化(SCAN Formalization)
身体(Somatic)・認知(Cognitive)・行動(Action)からなる SCAN(Somatic–Cognitive–Action Network) を形式的に定義する:
・S / C / A の定義
・安定性・変動性のモニタリング
・切り替えにおける SCAN の役割
・数理モデルとの接続(連立微分方程式)
・リミナルゾーンでの SCAN の挙動
・Figure D1:SCAN ループ図
確率モデル(Appendix A)と人間の行動制御を統合する章。
付録の読み方(How to Use This Appendix)
読者は次の 2 つのルートで付録を読むことができる:
1. 数学中心ルート(Mathematics-first Pathway)
A → B → C → D
・数学的導出
・パラメータ
・図による視覚化
・SCAN による行動レベルの統合
研究者・数理モデルに強い読者向け。
2. 概念中心ルート(Conceptual-first Pathway)
D → C → A → B
・行動モデル(SCAN)
・図による直感的理解
・数学的裏付け
・パラメータ確認
行動科学・認知科学の読者に適したルート。
まとめ(Summary)
付録 A〜D は以下を提供する:
・数学的基盤(Appendix A)
・モデル再現性のためのパラメータ(Appendix B)
・視覚的理解のための図版(Appendix C)
・身体・認知・行動レベルの統合モデル(Appendix D)
これらは論文Aの理論を支える、 統合的で包括的な補足資料となっている。
*****
Appendix A. 数学的基礎と証明
安定性・変動性・リミナルゾーン・切り替えの形式的導出と直感的説明
本付録では、論文Aで提示した「切り替えと変動性の統合理論」を支える数学的基盤を示す。 ここでは、純粋数学の厳密性よりも、読者が理論の構造を理解できることを優先し、 必要な定義・命題・証明に加えて、初学者向けの直感的説明も併記する。
構成は以下の通り:
A.1 安定性=ポテンシャル曲率であることの証明
A.2 変動性=安定性の逆数となる理由(OU 過程)
A.3 リミナルゾーン(鞍部)の存在証明
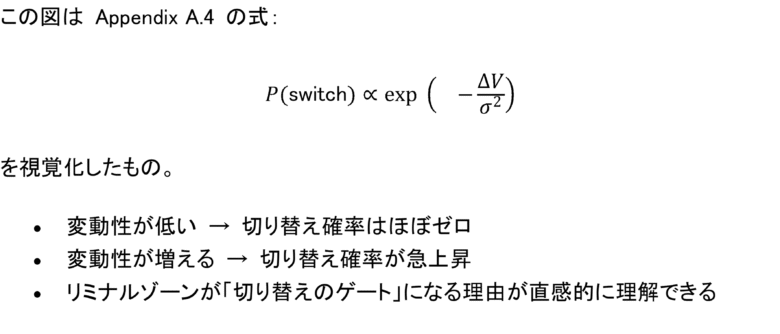
A.4 変動性の増大が切り替え確率を高める理由
A.5 伊藤の補題の直感的説明(初学者向け)
A.6 OU 過程と伊藤の補題の関係(なぜこの2つが重要なのか)
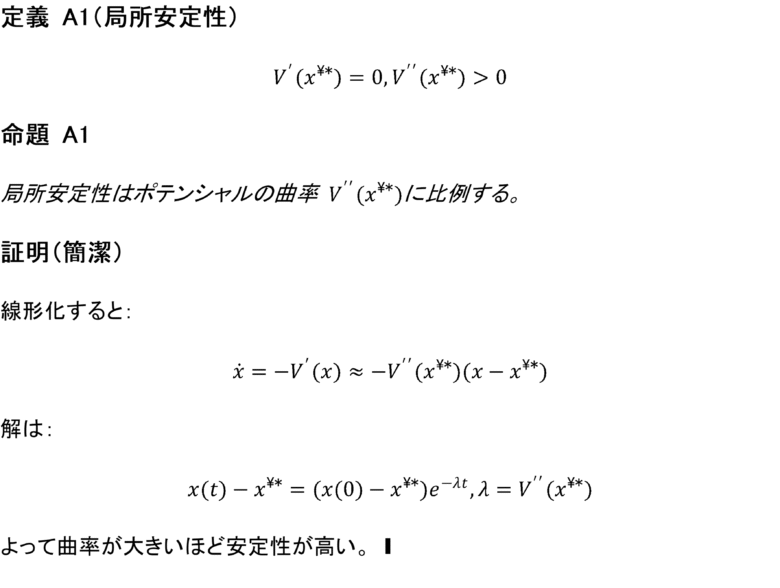
A.1 安定性はポテンシャルの曲率で決まる
歩行・走行などの運動状態を、ポテンシャル関数 V(x)を持つ1次元力学系として表す。
安定な運動モードは 局所最小点 に対応する。
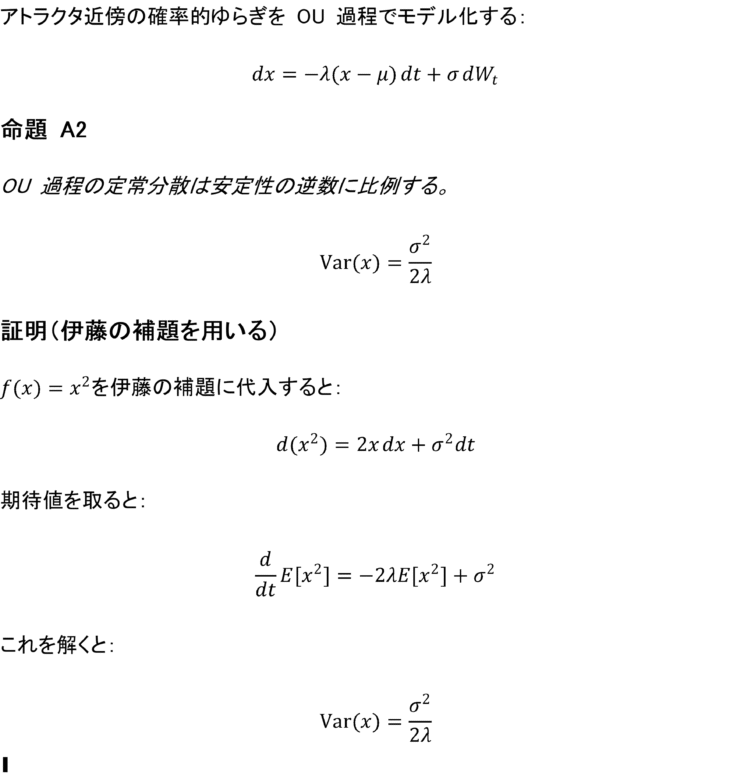
 A.2 変動性は安定性の逆数になる(OU 過程による導出)
A.2 変動性は安定性の逆数になる(OU 過程による導出)
 A.3 リミナルゾーン(鞍部)の存在
A.3 リミナルゾーン(鞍部)の存在
 A.4 変動性の増大は切り替え確率を高める
A.4 変動性の増大は切り替え確率を高める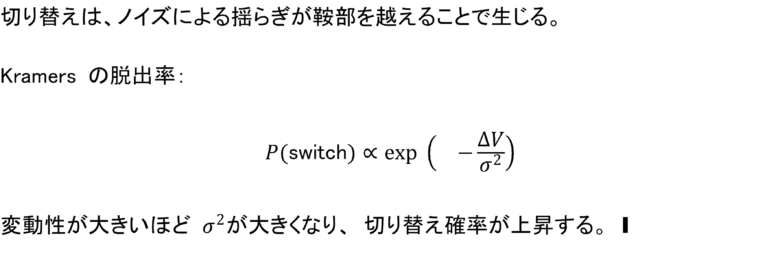 A.5 伊藤の補題の直感的説明(初学者向け)
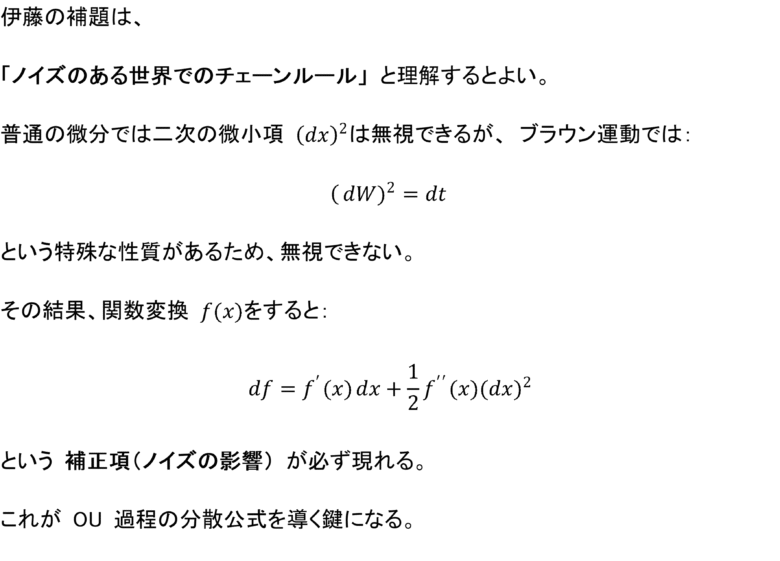
A.5 伊藤の補題の直感的説明(初学者向け)
 A.6 OU 過程と伊藤の補題の関係(なぜ重要か)
A.6 OU 過程と伊藤の補題の関係(なぜ重要か)
OU 過程は「ノイズつきの安定性モデル」であり、 伊藤の補題は「その解析を可能にする道具」である。
両者の関係は次のようにまとめられる:
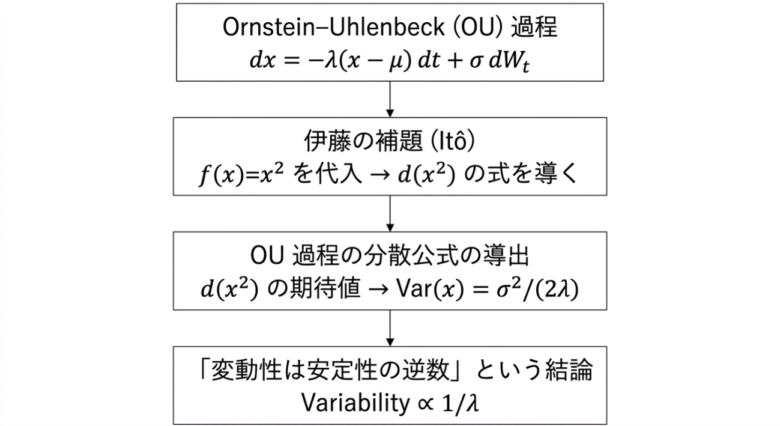 つまり:
つまり:
OU × 伊藤の補題 → Paper A の核心命題 「変動性は安定性の逆数」 が数学的に導かれる。
Appendix Aまとめ
本付録では、以下の数学的事実を示した:
①安定性はポテンシャルの曲率で定量化できる
②変動性は OU 過程と伊藤の補題により「安定性の逆数」として導かれる
③歩行と走行の間には必ずリミナルゾーンが存在する
④変動性が増大すると切り替え確率が上昇する
⑤伊藤の補題はノイズのある世界のチェーンルールであり、OU 過程の解析に不可欠
⑥OU 過程と伊藤の補題の組み合わせが、統合理論の数学的基盤を形成する
*****
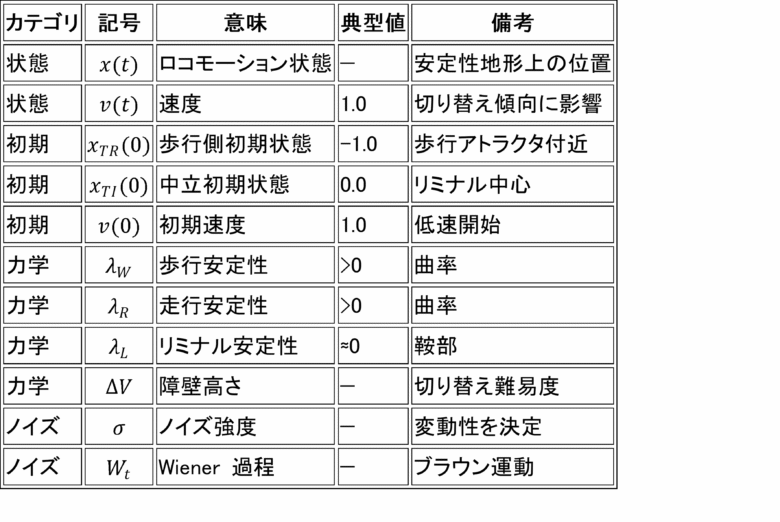
Appendix B. パラメータ定義(Parameter Definitions)
モデルで使用する変数・パラメータ・初期条件とその解釈
本付録では、論文Aで用いた数学モデルおよびシミュレーションに登場する すべての変数・パラメータ・初期条件を整理し、その意味と役割を明確に示す。 目的は、読者がモデルを再現・拡張できるように、透明性と再現性(reproducibility)を確保することである。
パラメータは以下の3つに分類される:
①状態変数(State Variables)
②力学パラメータ(Dynamical Parameters)
③ノイズ・変動性パラメータ(Noise and Variability Parameters)
B.1 状態変数(State Variables)
本研究では、歩行・走行などの運動状態を低次元の状態変数で表現する。 主たる状態変数は ロコモーション状態 x(t)であり、 これは安定性地形(Walking → Liminal Zone → Running)上の位置を表す。
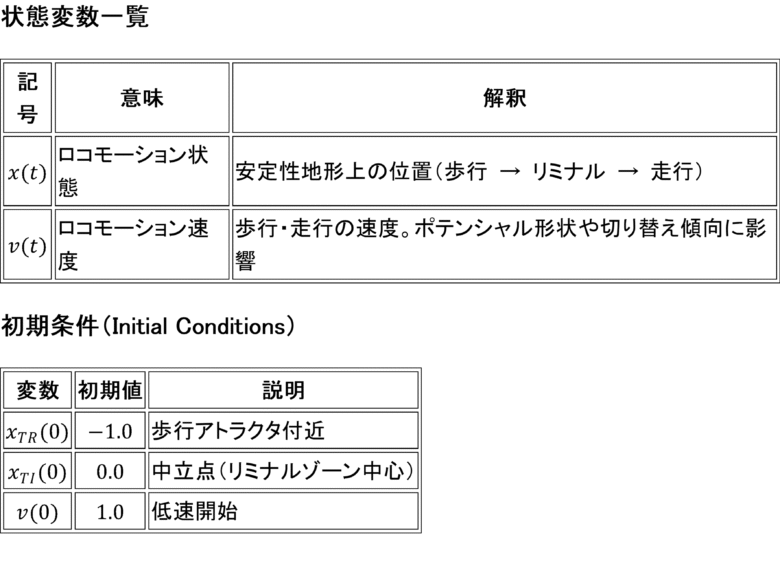 これらは本文および Appendix C のシミュレーションで使用した初期条件と一致する。
これらは本文および Appendix C のシミュレーションで使用した初期条件と一致する。
B.2 力学パラメータ(Dynamical Parameters)
ロコモーション状態の時間発展は、ポテンシャル関数 V(x)とその安定性特性によって決まる。
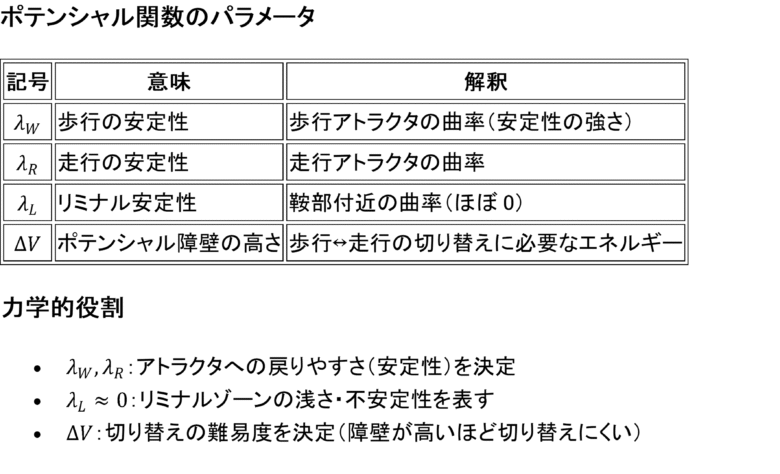 これらは Appendix A の安定性解析と整合する。
これらは Appendix A の安定性解析と整合する。
B.3 ノイズ・変動性パラメータ(Noise and Variability Parameters)
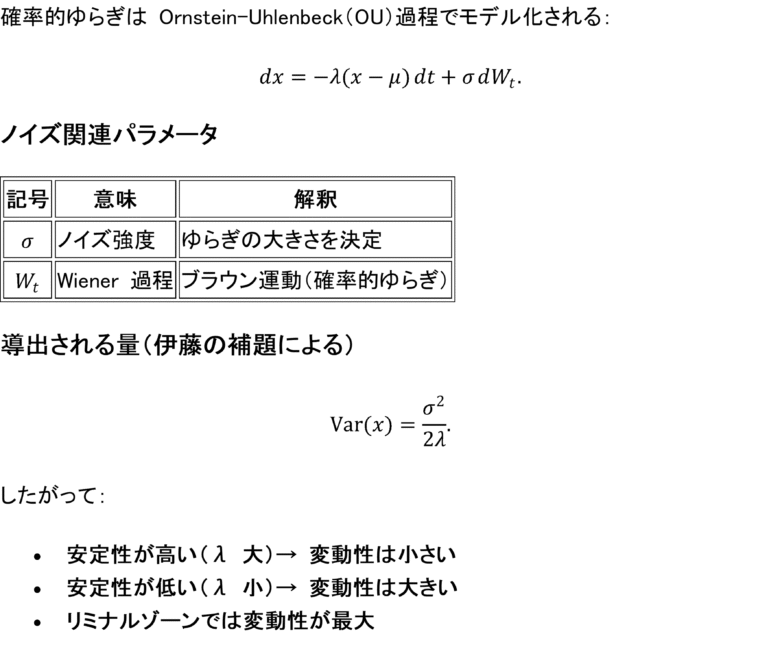 これは論文Aの中心命題と一致する。
これは論文Aの中心命題と一致する。
B.4 パラメータ一覧(総合表)
 B.5 再現性に関する注意
B.5 再現性に関する注意
・本文および Appendix C のシミュレーションは、すべて本付録のパラメータセットを使用している。
・OU 過程に基づく変動性モデルは Appendix A の数学的証明と整合する。
・ポテンシャル地形のパラメータ(λ_W,λ_R,λ_L)は、Figure A1〜A4 の図示内容と一致する。
*****
Appendix C. 追加図版(Additional Diagrams)
安定性・変動性・切り替えダイナミクスを補足する視覚的資料
本付録では、Appendix A(数学的基礎)および Appendix B(パラメータ定義)で示した内容を 視覚的に補足するための図版を掲載する。
これらの図は、以下の理解を助ける目的で作成されている:
・安定性地形(Walking–Liminal–Running)の構造
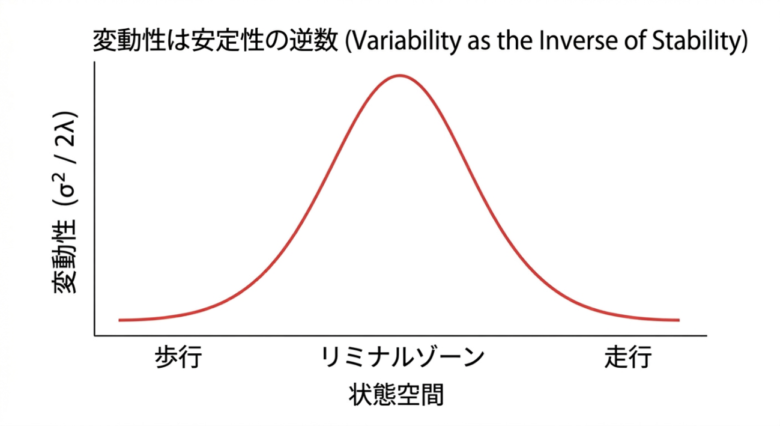
・変動性が安定性の逆数となる理由
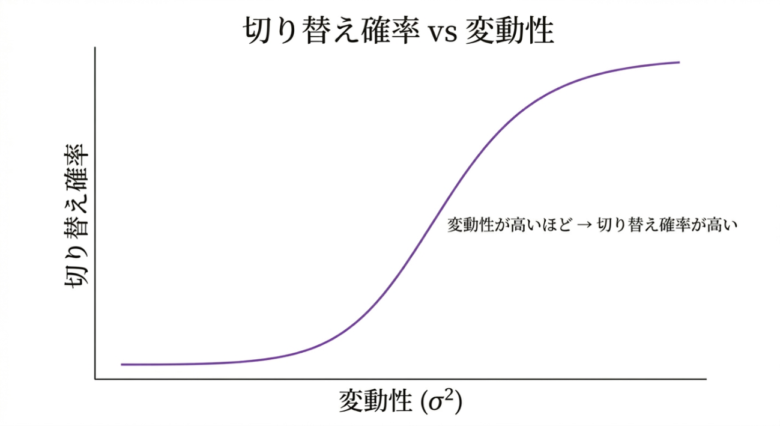
・変動性の増大が切り替え確率を高めるメカニズム
C.1 安定性地形(Walking – Liminal – Running)
Figure C1. Stability Landscape Diagram
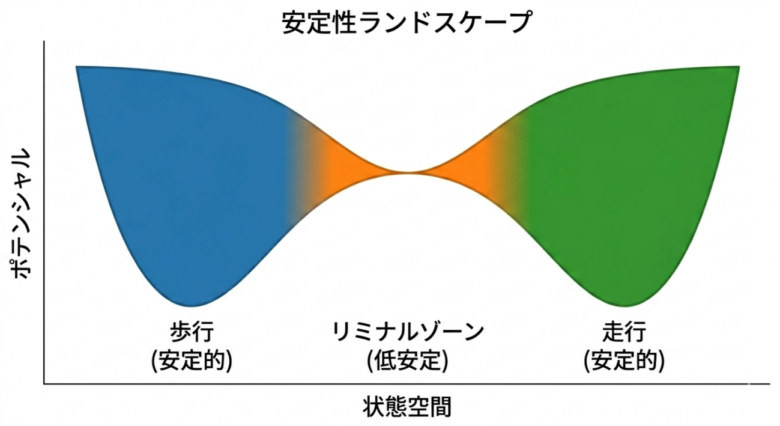 この図は、論文A全体で用いられる 安定性地形(stability landscape) を示す。 左に歩行アトラクタ、中央に浅いリミナルゾーン、右に走行アトラクタが配置される。
この図は、論文A全体で用いられる 安定性地形(stability landscape) を示す。 左に歩行アトラクタ、中央に浅いリミナルゾーン、右に走行アトラクタが配置される。
この図は以下を視覚的に補強する:
・Appendix A.1(安定性=曲率)
・Appendix A.3(リミナルゾーンの存在)
・Appendix B(パラメータの意味)
C.2 変動性曲線(安定性の逆数)
Figure C2. Variability as the Inverse of Stability
 C.3 切り替え確率と変動性の関係
C.3 切り替え確率と変動性の関係
Figure C3. Switching Probability vs Variability
 Appendix C(日本語版)まとめ
Appendix C(日本語版)まとめ
本付録には以下の 3 図を収録した:
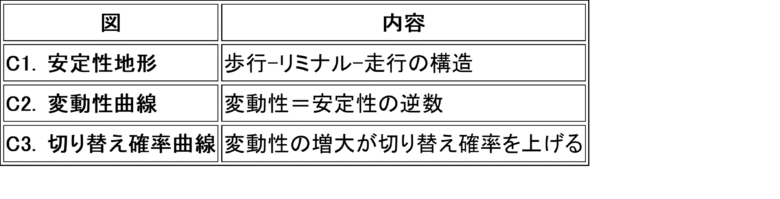 これらは Appendix A(数学)と Appendix B(パラメータ)を視覚的に補完し、 論文Aの理論を直感的に理解する助けとなる。
これらは Appendix A(数学)と Appendix B(パラメータ)を視覚的に補完し、 論文Aの理論を直感的に理解する助けとなる。
*****
Appendix D. SCAN の形式化(SCAN Formalization)
身体・認知・行動ネットワーク(Somatic–Cognitive–Action Network)の形式的記述と、切り替え・変動性における役割
本付録では、論文Aで用いる SCAN(Somatic–Cognitive–Action Network)モデルを形式的に定義する。 SCAN は、Appendix A の数学モデル(安定性・変動性・切り替え)と、 人間の実際の歩行行動をつなぐ 概念的ブリッジとして機能する。
SCAN は、
・身体(Somatic)
・認知(Cognitive)
・行動(Action)
の 3 つのコンポーネントから構成される閉ループシステムであり、 人間が歩行中に安定性・変動性・環境要求をどのようにモニタリングし、 必要に応じて歩行モードを切り替えるかを説明する枠組みである。
D.1 SCAN フレームワークの概要
SCAN は以下の 3 コンポーネントから構成される:
①Somatic(身体系) — 生理・身体状態の調整
②Cognitive(認知系) — 予測・評価・注意・意思決定
③Action(行動系) — 運動指令・制御・歩行パターン生成
これらは以下のような 閉ループネットワークを形成する:
S⟷C⟷A⟷S
このループは、安定性の低下や変動性の増大をリアルタイムで検出し、 必要に応じて歩行モードの調整や切り替えを行う。
D.2 各コンポーネントの定義
(1) Somatic System S(身体系)
身体的・生理的状態を表す:
・姿勢
・筋緊張
・関節剛性
・エネルギーコスト
・感覚フィードバック(前庭・固有感覚)
形式的には:
S(t)∈R^n.
(2) Cognitive System C(認知系)
高次の処理を担う:
・未来状態の予測
・安定性の評価
・注意の配分
・切り替えの意思決定
形式的には:
C(t)∈R^m.
(3) Action System A(行動系)
運動指令と制御を担う:
・ステップタイミング
・足の接地位置
・プッシュオフ力
・歩行パターンの選択
形式的には:
A(t)∈R^k.
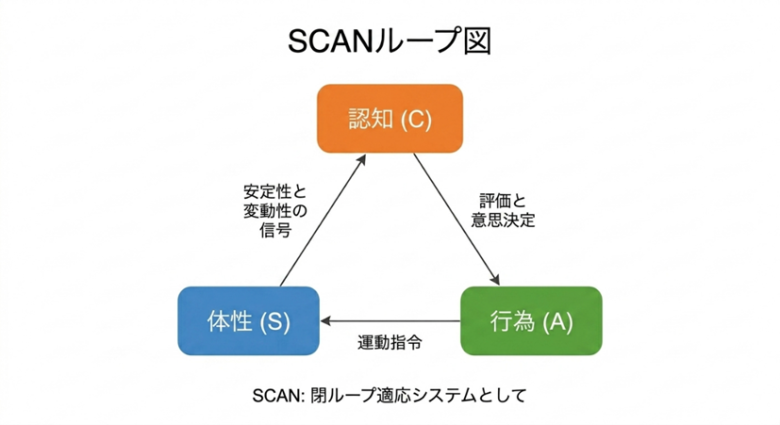 Figure D1. SCAN ループ図。 Somatic(S)、Cognitive(C)、Action(A)の各システムは、相互に作用する閉ループ型の適応ネットワークを形成している。 Somatic 系は安定性や変動性の揺らぎを検出し、Cognitive 系はそれらの信号を評価して、モード調整や切り替えが必要かどうかを判断する。 Action 系は運動指令を生成し、それが Somatic 系に影響を与えることでループが完結する。 この継続的な循環により、SCAN は歩行中の安定性を調整し、変動性を解釈し、歩行と走行の切り替えを統合的に制御する。
Figure D1. SCAN ループ図。 Somatic(S)、Cognitive(C)、Action(A)の各システムは、相互に作用する閉ループ型の適応ネットワークを形成している。 Somatic 系は安定性や変動性の揺らぎを検出し、Cognitive 系はそれらの信号を評価して、モード調整や切り替えが必要かどうかを判断する。 Action 系は運動指令を生成し、それが Somatic 系に影響を与えることでループが完結する。 この継続的な循環により、SCAN は歩行中の安定性を調整し、変動性を解釈し、歩行と走行の切り替えを統合的に制御する。
D.3 SCAN と歩行モード切り替え
SCAN は、安定性と変動性を継続的にモニタリングし、 歩行モードの切り替えを調整する。
・Somatic 系:身体の揺らぎ(変動性)を検出
・Cognitive 系:現在のモードが最適かどうかを評価
・Action 系:歩行パラメータを調整、または切り替えを実行
切り替えは次の条件で発生する:
C(t)” が ” λ(t)” の低下または ” Var(x)” の増大を検出したとき”
これは Appendix A の数学的結果と一致する。
D.4 変動性と SCAN の相互作用
変動性(variability)は SCAN にとって 2 つの役割を持つ:
①シグナル(signal) — 安定性低下の指標
②ドライバ(driver) — 切り替えを可能にする揺らぎ
SCAN 内の流れは:
S(t)→C(t)→A(t)
例:
・身体揺らぎの増大 → S が検出
・C が「安定性低下」と判断
・A が歩行パラメータを調整、または切り替えを開始
つまり SCAN は、Appendix A の確率力学(OU 過程・変動性)を 行動レベルで解釈する制御系である。
D.5 SCAN の形式的表現(数理モデルとの接続)
 D.6 SCAN とリミナルゾーンの関係
D.6 SCAN とリミナルゾーンの関係
リミナルゾーンは:
・安定性が低い(λ≈0)
・変動性が高い
・認知的関与が増大する
という特徴を持つ。
SCAN はこの領域で特異的な挙動を示す:
・S:不安定性を検出
・C:予測・評価を強化
・A:探索的な運動(variability の増大)を生成
 Appendix D(日本語版)まとめ
Appendix D(日本語版)まとめ
本付録では、SCAN フレームワークを形式的に定義し、 数学モデルとの関係を明確にした:
①SCAN は Somatic・Cognitive・Action の 3 系から構成される
②これらは 閉ループ適応システムを形成する
③SCAN は安定性と変動性をモニタリングし、切り替えを調整する
④変動性は シグナルであり 切り替えのドライバでもある
⑤SCAN はポテンシャル地形 V(x)と確率力学を行動レベルで統合する
⑥リミナルゾーンは SCAN が最大限に関与する領域である
これにより、SCAN と Appendix A の確率モデルが統合され、 Paper A の「切り替えと変動性の統合理論」が完成する。