論文 A
ヒト歩行における切り替えと変動性の統一理論 ~ リミナルゾーン・制約・最適化を統合するシステム論的・数理的枠組み ~
要旨(Abstract)
ヒトの歩行は、歩行から走行への切り替えに代表されるように、明確な離散的転換を示す。この切り替えは意識的な指令によって生じるのではなく、変動性の増大、安定性の低下、制約構造の変化といった特徴的な兆候を伴う。本論文では、切り替えを 変動性駆動の再編成(variability driven reorganization) として捉え、これを 制約ベース最適化 と アトラクタ安定性、そして SCAN(Somatic–Cognitive–Action–Navigation) に基づく知覚–行為ループと統合する統一理論を提案する。リミナルゾーンを安定性の低い領域として数理的に定式化し、切り替えが生じる閾値条件を導出する。本枠組みは、歩行–走行切り替え、変動性の役割、外部介入(例:Standard Pole Walking)の影響を一貫して説明する基盤を提供する。
1. 序論(Introduction)
ヒトの歩行は、速度の上昇に伴う歩行から走行への切り替えなど、離散的な転換を示す。この現象は古くから、
・生体力学的要因、
・エネルギー効率、
・神経制御、
などの観点から説明されてきた。
しかし、従来の説明では次の点が十分に説明されていない。
・なぜ切り替えは特定の速度付近で生じるのか
・なぜ切り替え前に変動性が増大するのか
・なぜ切り替えは頑健でありながら柔軟なのか
・なぜ外部介入によって切り替え速度が変化するのか
本論文では、切り替えを システム全体の再編成(system level reorganization) として捉え、以下の4要素を統合する。
①制約ベース最適化(constraint based optimization)
②変動性駆動の探索(variability driven exploration)
③アトラクタ安定性の変化(attractor stability)
④SCAN による知覚–認知評価(perceptual–cognitive evaluation)
これらを統合することで、歩行切り替えの統一的説明が可能となる。
2. 背景と関連研究(Background and Related Work)
2.1 アトラクタダイナミクス
歩行と走行は、力学系の安定解(アトラクタ)としてモデル化できる。 一般に、
・低速では歩行が最適、
・高速では走行が最適、
・中間領域では安定性が低下する、
ことが知られている。
しかし、従来のアトラクタモデルは、変動性の構造や知覚的要因を十分に説明しない。
2.2 歩行変動性
変動性は単なるノイズではなく、以下の特徴を持つ。
・切り替え前に増大する
・ランダムではなく構造を持つ
・システムの探索行動を反映する
したがって変動性は、機能的役割を持つ探索メカニズム として理解できる。
2.3 制約ベース最適化
歩行は、以下の制約のもとで最適化される。
・身体的制約(organismic)
・環境的制約(environmental)
・課題的制約(task)
制約が変化すると、最適解も変化する。
2.4 リミナルゾーン
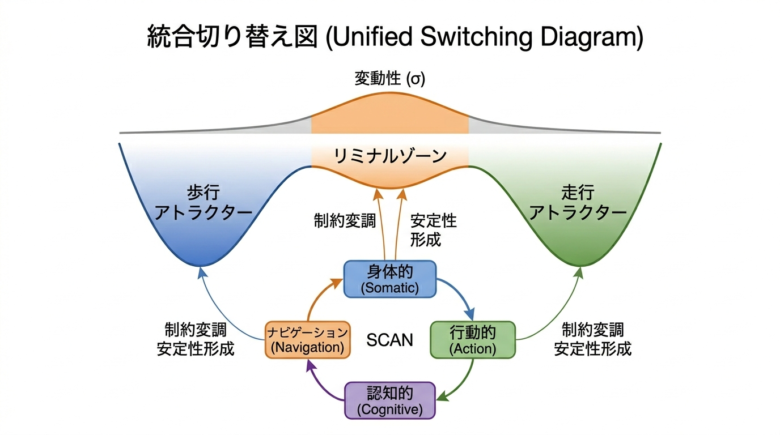
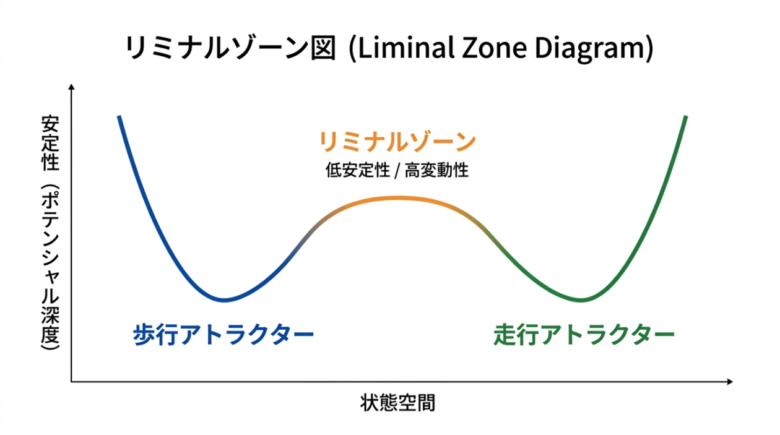 図A1. 歩行・リミナルゾーン・走行に対応するアトラクタ地形。
図A1. 歩行・リミナルゾーン・走行に対応するアトラクタ地形。
本図は、ヒトの歩行における安定性地形(ポテンシャル様関数)を概念的に示したものである。 歩行と走行はそれぞれ局所的な安定解(アトラクタ)として表され、その間には安定性が低下した浅い領域 ― リミナルゾーン ― が存在する。速度や負荷などの制約が変化すると、この地形は変形し、アトラクタの深さやリミナルゾーンの幅が変動する。本図は、歩行から走行への切り替えを「安定性の変化に伴う再編成」として理解するための基盤を与える。
歩行と走行の間には、安定性が低下した領域が存在する。 これが リミナルゾーン(liminal zone) である。
特徴:
・変動性の増大
・感覚的曖昧さ
・エネルギー効率の低下
・安定性の減少
本論文では、この領域を数理的に定義する。
3. 理論枠組み(Theoretical Framework)
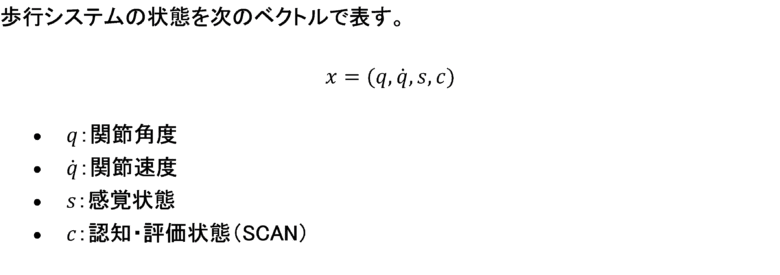
3.1 状態変数
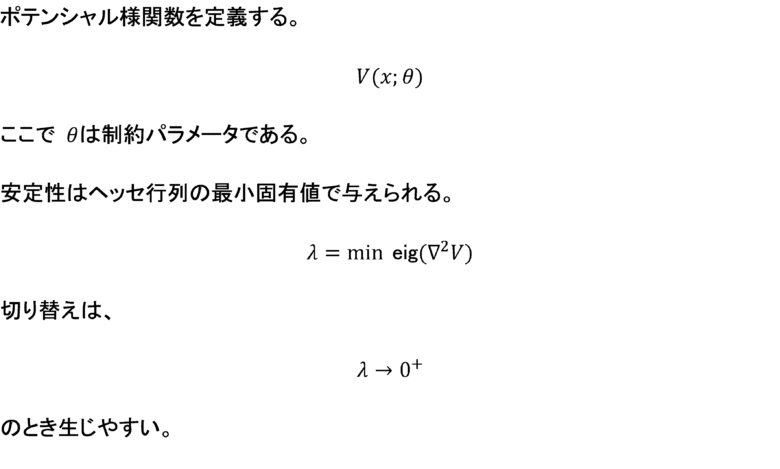
 3.2 安定性地形(Stability Landscape)
3.2 安定性地形(Stability Landscape)
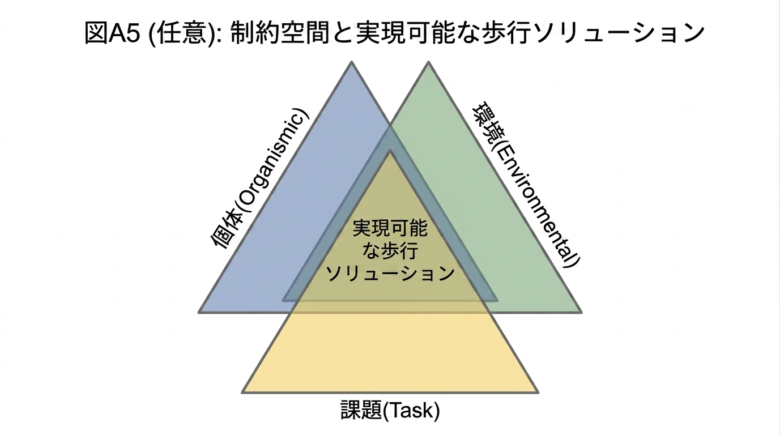 図A5. 制約空間と実現可能な歩行解の概念図。
図A5. 制約空間と実現可能な歩行解の概念図。
ヒトの歩行は、身体的制約(Organismic)、環境的制約(Environmental)、課題的制約(Task)の三要素の相互作用から生じる。 本図ではこれら三つの制約領域を重ね合わせ、その交差部分に「実現可能な歩行解」が位置づけられる。制約の変化は実現可能領域を変形させ、歩行と走行の最適性を左右する。本図は、制約ベース最適化とアトラクタダイナミクスを結びつける概念モデルである。
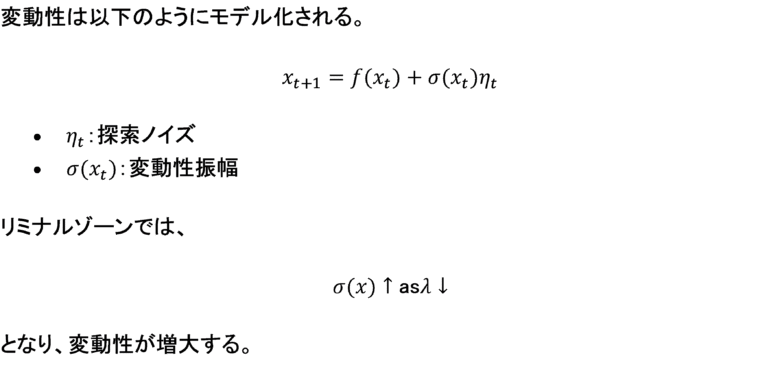
3.3 変動性の数理モデル
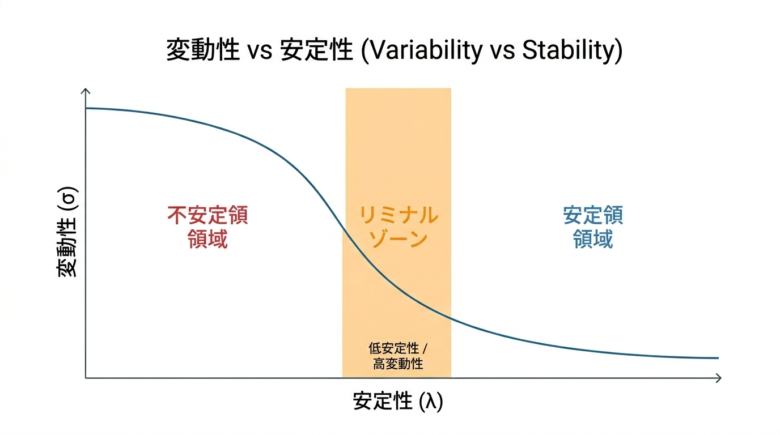 図A2. 安定性と変動性の関係。
図A2. 安定性と変動性の関係。
本図は、安定性指標 λと変動性振幅 σの逆相関関係を示す。 安定した歩行パターンでは変動性は低いが、リミナルゾーンに入ると復元力が弱まり、変動性が増大する。これは変動性が単なるノイズではなく、より安定した解を探索するための「機能的探索」として働くことを示唆する。
4. リミナルゾーンの数理定義(Mathematical Formulation)
4.1 定義
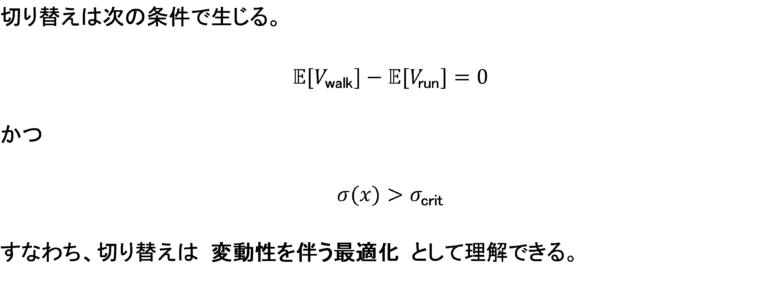
 4.2 切り替え閾値
4.2 切り替え閾値
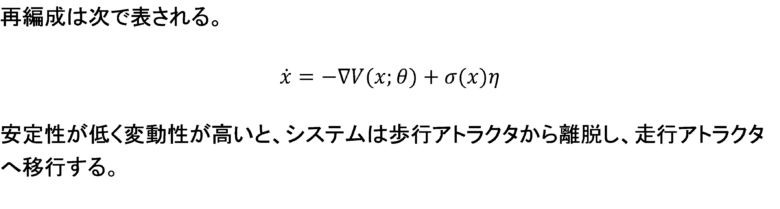
 4.3 再編成ダイナミクス
4.3 再編成ダイナミクス
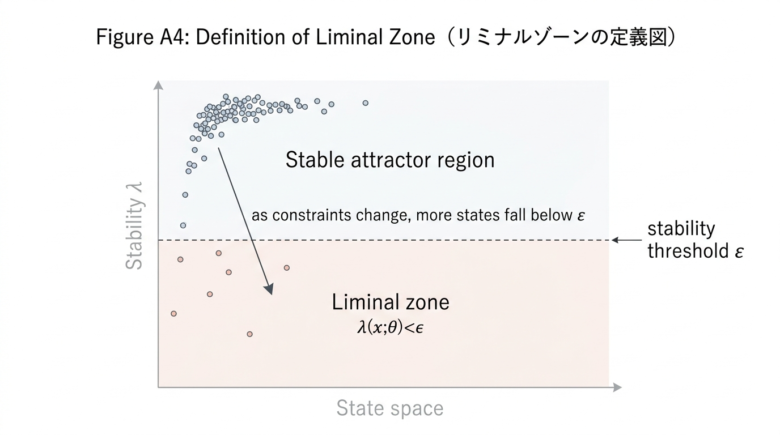 図A4. 安定性閾値に基づくリミナルゾーンの形式的定義。
図A4. 安定性閾値に基づくリミナルゾーンの形式的定義。
本図は、安定性 λ(x;θ)を状態空間上に描き、閾値 ϵを境界としてリミナルゾーンを定義したものである。 閾値より下の領域がリミナルゾーンであり、安定アトラクタ領域との境界が明確に示される。この形式化により、切り替えが生じやすい条件を定量的に扱うことが可能となる。
5. 切り替えメカニズム(Switching Mechanism)
切り替えは離散的な指令ではなく、以下の過程として生じる。
①制約が変化する(速度上昇、疲労、地形変化)
②歩行アトラクタの安定性が低下
③変動性が増大
④SCAN が努力感・不安定性を評価
⑤システムが走行アトラクタへ再編成
6. 概念的シミュレーション(Conceptual Examples)
6.1 速度による切り替え
速度上昇に伴い:
・歩行アトラクタが浅くなる
・走行アトラクタが深くなる
・リミナルゾーンが広がる
6.2 制約操作
負荷、ポール、傾斜などの制約変更は、安定性地形を変形させる。
7. 考察(Discussion)
7.1 SCAN との統合
SCAN は知覚–認知レイヤとして機能し、
・身体信号の評価
・努力感の解釈
・行為選択の調整
を担う。
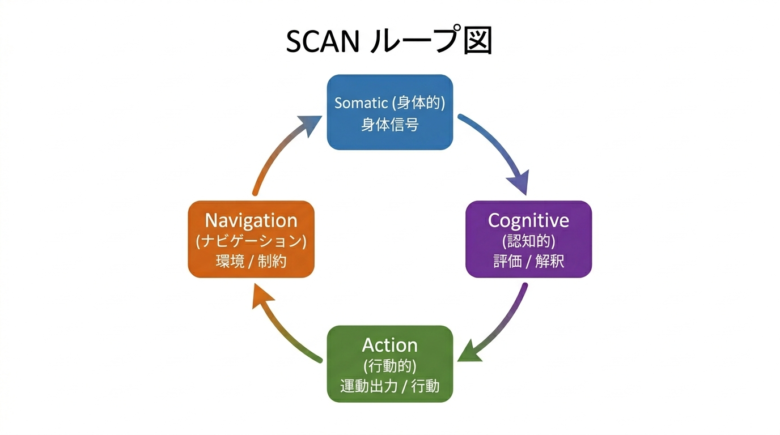 図A3. SCAN を統合した歩行切り替え時の知覚–行為ループ。
図A3. SCAN を統合した歩行切り替え時の知覚–行為ループ。
SCAN(Somatic–Cognitive–Action–Navigation)フレームワークを、円環状の知覚–行為ループとして示した図である。 身体的信号(Somatic)は努力感や不安定性を伝え、認知的評価(Cognitive)がそれを解釈し、行為選択(Action)が歩行パターンを調整し、環境・制約(Navigation)が再び身体状態へフィードバックする。ループ中央の変動性は、より安定したアトラクタを探索するための機能的メカニズムとして働く。
7.2 歩行分析への示唆
本理論は以下を説明する。
・変動性が診断指標となる理由
・個人差による切り替え速度の違い
・外部介入が切り替えを変える仕組み
7.3 限界と今後の課題
・安定性指標の実証
・計算モデルの構築
・神経力学モデルとの統合
8. 結論(Conclusion)
本論文は、歩行切り替えを説明する統一理論を提示した。 アトラクタダイナミクス、制約ベース最適化、変動性駆動探索、SCAN を統合することで、歩行–走行切り替えのメカニズムを一貫して説明できる。
 本枠組みは、Standard Pole Walking のような外部介入の分析にも応用可能であり、その詳細は論文Bで扱う。
本枠組みは、Standard Pole Walking のような外部介入の分析にも応用可能であり、その詳細は論文Bで扱う。