Paper A
A Unified Theory of Switching and Variability in Human Locomotion
A systems theoretic and mathematical formulation of liminal zones, constraints, and optimization
Abstract
Human locomotion exhibits discrete transitions—most notably the switch between walking and running—that emerge without explicit conscious control. These transitions are accompanied by characteristic increases in variability, changes in stability, and shifts in the underlying constraint structure. This paper proposes a unified theoretical framework that explains switching as a variability driven reorganization within a constraint based optimization landscape. We formalize liminal zones as regions of reduced attractor stability, derive mathematical conditions for transition thresholds, and integrate these with a systems theoretic model of perception–action coupling. The resulting theory provides a coherent explanation for gait transitions, variability modulation, and the influence of external interventions such as Standard Pole Walking.
1. Introduction
Transitions in human locomotion—such as the switch from walking to running—have long been studied as biomechanical, energetic, or neural phenomena. Yet no single perspective fully explains:
・why transitions occur at specific speeds,
・why variability increases before switching,
・why transitions are robust yet flexible,
・and how external constraints reshape transition behavior.
We argue that switching is best understood as a system level reorganization driven by:
①Constraint based optimization
②Variability driven exploration
③Attractor stability changes
④Perceptual–cognitive evaluation (SCAN)
This paper develops a unified mathematical and conceptual framework that integrates these elements.
2. Background and Related Work
2.1 Attractor Dynamics in Locomotion
Human gait can be modeled as a dynamical system with stable attractors corresponding to walking and running. Prior work has shown that:
・walking is optimal at low speeds,
・running is optimal at higher speeds,
・transitions occur near points of reduced stability.
However, classical attractor models do not fully explain variability patterns or perceptual contributions.
2.2 Variability in Human Gait
Variability is often treated as noise, yet empirical studies show:
・variability increases before transitions,
・variability is structured, not random,
・variability reflects exploration of alternative solutions.
This suggests variability is a functional mechanism, not an error.
2.3 Constraint Based Optimization
Locomotion must satisfy constraints arising from:
・organismic factors (strength, morphology),
・environmental factors (terrain, slope),
・task demands (speed, load).
The system seeks locally optimal solutions within these constraints.
2.4 Liminal Zones
The region between walking and running—where neither attractor is fully stable—is known as the liminal zone. It is characterized by:
・increased variability,
・ambiguous sensory cues,
・rising metabolic cost,
・reduced stability.
We formalize this region mathematically in Section 4.
3. Theoretical Framework
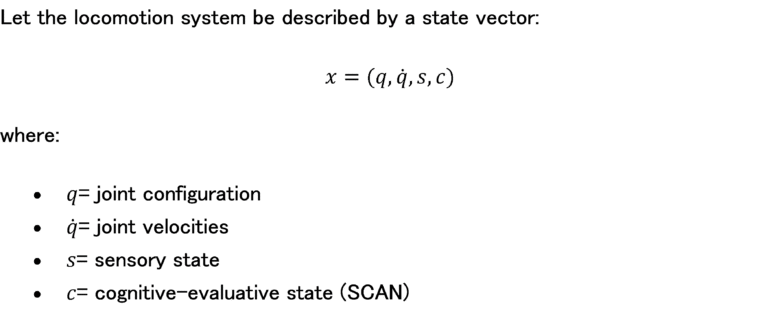
3.1 State Variables
 3.2 Stability Landscape
3.2 Stability Landscape
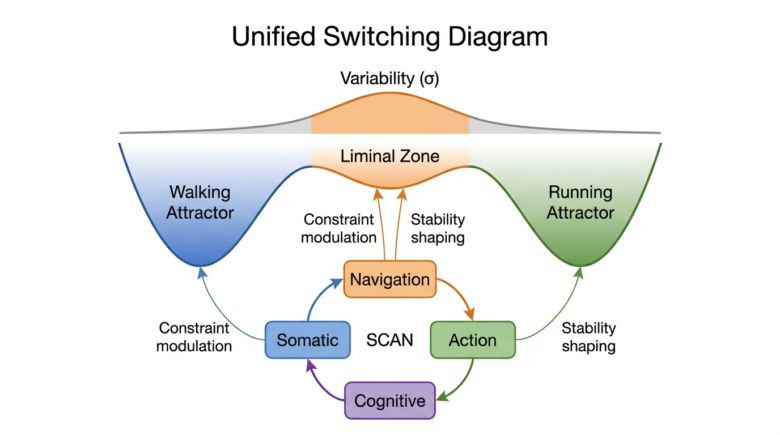
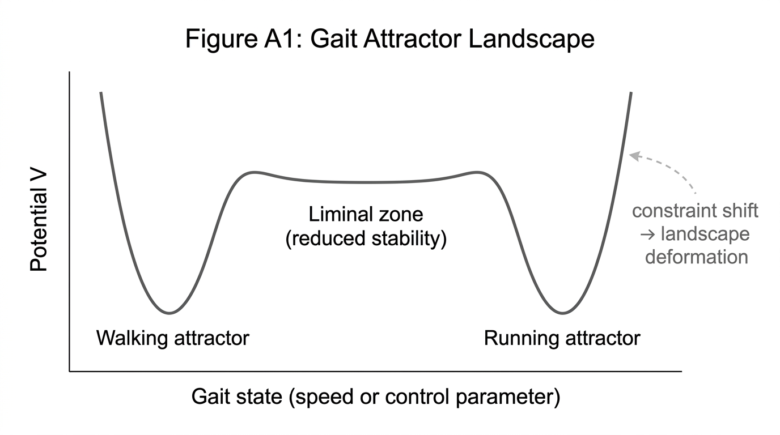 Figure A1. Attractor landscape for walking, liminal zone, and running.
Figure A1. Attractor landscape for walking, liminal zone, and running.
This figure illustrates the potential like stability landscape underlying human gait. Walking and running appear as distinct attractor basins separated by a shallow intermediate region—the liminal zone—where stability is reduced. As constraints such as speed or load change, the landscape deforms, altering the depth of each attractor and the width of the liminal zone. This representation provides the foundation for modeling gait transitions as stability driven reorganizations.
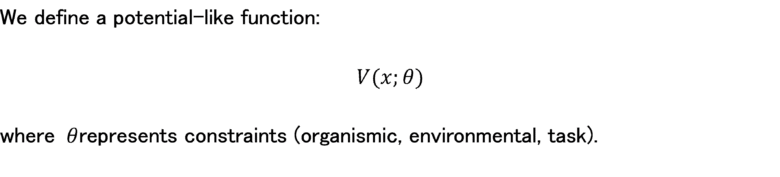
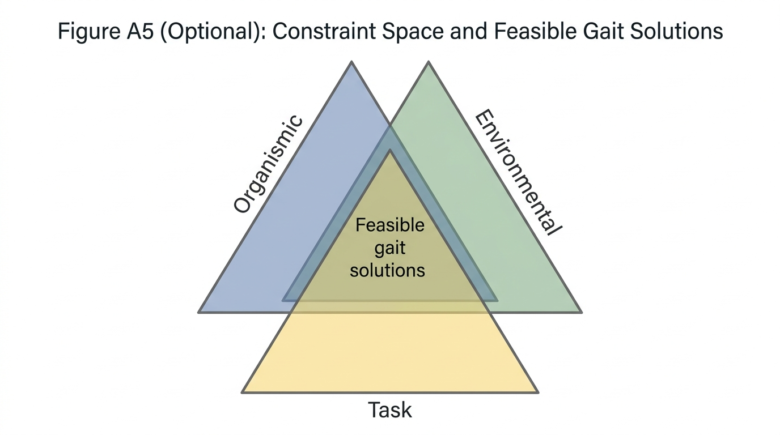 Figure A5. Constraint space and feasible gait solutions.
Figure A5. Constraint space and feasible gait solutions.
Legend. Human locomotion emerges from the interaction of organismic, environmental, and task constraints. The diagram depicts these three constraint categories as overlapping regions, with feasible gait solutions located at their intersection. Changes in any constraint set alter the feasible region and can shift the optimality of walking versus running. This conceptual model links constraint based optimization to attractor dynamics.
Walking and running correspond to local minima of V.
 3.3 Variability as Structured Noise
3.3 Variability as Structured Noise
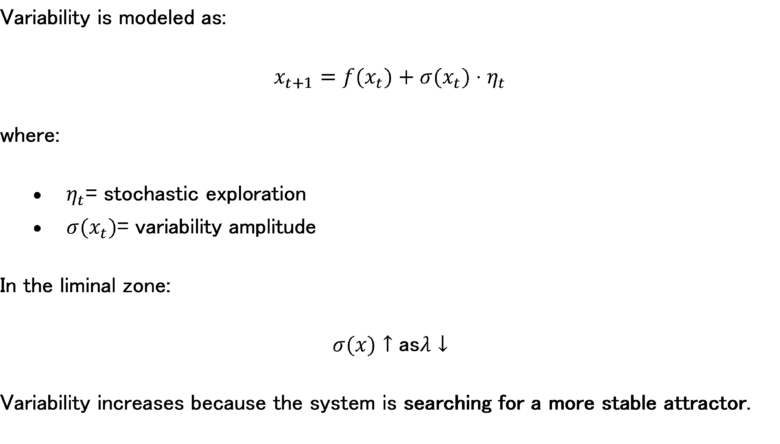
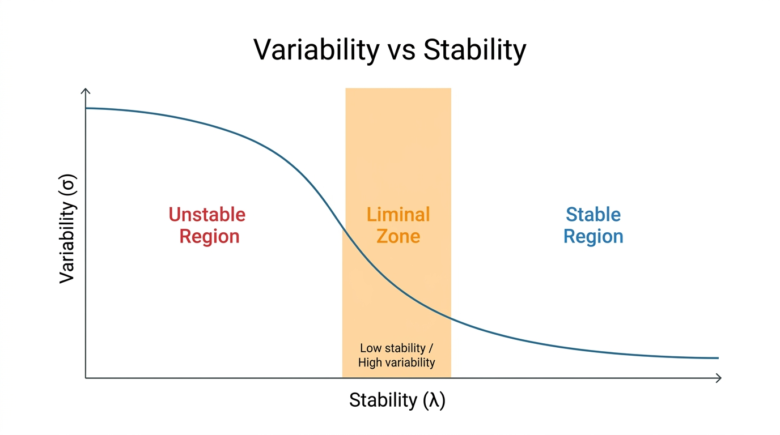 Figure A2. Relationship between stability and variability in human locomotion.
Figure A2. Relationship between stability and variability in human locomotion.
Variability increases as attractor stability decreases. The diagram shows an inverse relationship between the stability metric λand the variability amplitude σ. Stable gait patterns exhibit low variability, whereas states within the liminal zone show elevated variability due to reduced restoring forces. This relationship supports the interpretation of variability as functional exploration rather than random noise.
4. Mathematical Formulation of Liminal Zones
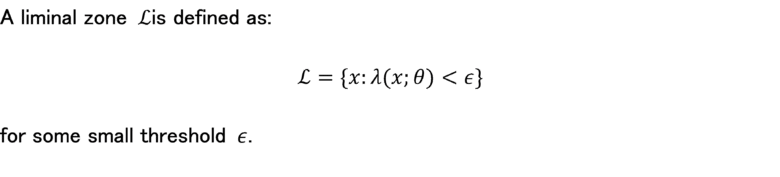
4.1 Definition
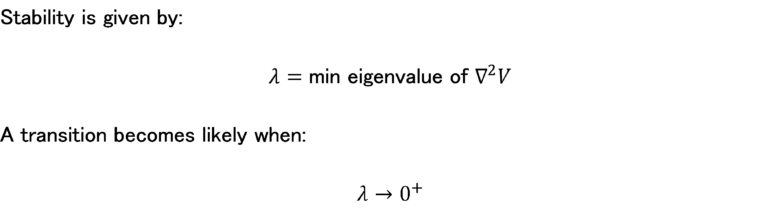
 4.2 Transition Threshold
4.2 Transition Threshold
 4.3 Reorganization Dynamics
4.3 Reorganization Dynamics
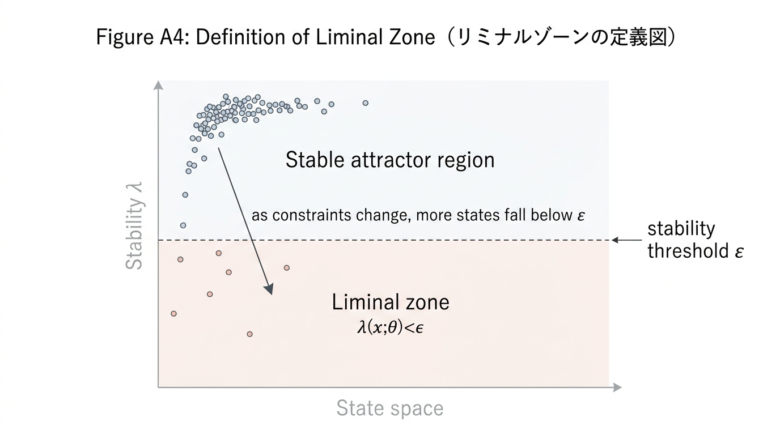 Figure A4. Formal definition of the liminal zone based on stability threshold.
Figure A4. Formal definition of the liminal zone based on stability threshold.
The liminal zone is defined as the region of state space where attractor stability falls below a threshold ϵ. The figure shows stability λ(x;θ)plotted against state variables, with the threshold line marking the boundary between stable attractor regions and the liminal zone. This formalization provides a quantitative basis for predicting when transitions become likely.
5. Switching Mechanism
Switching is not a discrete command but an emergent process:
①Constraints shift (speed ↑, fatigue ↑, terrain change).
②Walking attractor stability decreases.
③Variability increases.
④SCAN detects rising effort and instability.
⑤System reorganizes into the running attractor.
This explains why switching is:
・robust,
・flexible,
・not consciously controlled.
6. Conceptual Simulations
We provide conceptual examples:
6.1 Speed Driven Transition
As speed increases:
・walking basin narrows,
・running basin deepens,
・liminal zone widens.
6.2 Constraint Manipulation
Changing constraints (e.g., added load, poles, incline) shifts the landscape.
7. Discussion
7.1 Integration with SCAN
SCAN provides the perceptual–cognitive layer:
・somatic signals detect instability,
・cognitive evaluation interprets effort,
・action selection modulates variability.
Thus SCAN is the interpretive layer of the optimization process.
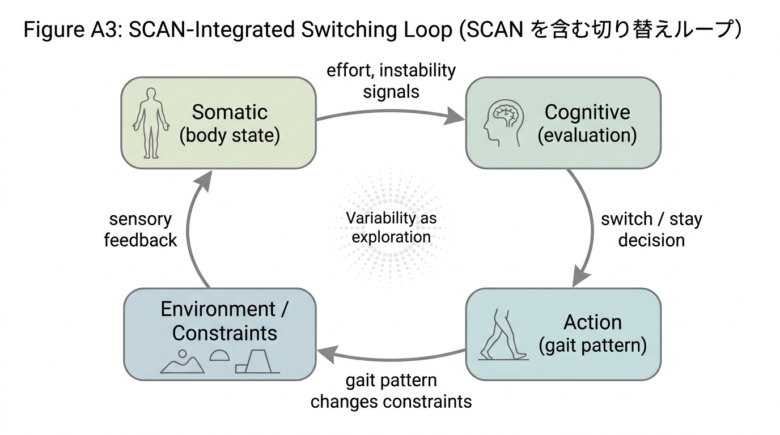 Figure A3. SCAN integrated perception–action loop during gait transitions.
Figure A3. SCAN integrated perception–action loop during gait transitions.
The SCAN framework (Somatic–Cognitive–Action–Navigation) is represented as a circular perception–action loop. Somatic signals convey mechanical effort and instability; cognitive evaluation interprets these signals; action selection modifies gait patterns; and environmental constraints feed back into somatic states. Variability acts as an exploratory mechanism within this loop, enab
7.2 Implications for Gait Analysis
The unified theory explains:
・why variability is diagnostic,
・why transitions occur at different speeds across individuals,
・how interventions reshape stability.
7.3 Limitations and Future Work
Future work should include:
・empirical validation of stability metrics,
・computational simulations,
・integration with neuromechanical models.
8. Conclusion
We have proposed a unified theory of switching and variability in human locomotion. By integrating attractor dynamics, constraint based optimization, variability driven exploration, and perceptual–cognitive evaluation, we provide a coherent explanation for gait transitions and their modulation by external constraints.
 This framework lays the foundation for analyzing interventions such as Standard Pole Walking, which will be addressed in Paper B.
This framework lays the foundation for analyzing interventions such as Standard Pole Walking, which will be addressed in Paper B.
*** Link ***
→ Paper A : Appendix (A~D)
→ Paper B
→ TOPICS – Key Themes and Research Directions in SPW —
→ English Article Series 1
→ English Gateway Page