論文B
Standard Pole Walking:バイオメカニクス・安定性・システムダイナミクスの分析
― 設計された歩行システムとしての SPW の階層的・制約ベース的理解 ―
要旨(Abstract)
Standard Pole Walking(SPW)は、日本で開発された垂直ポールを用いる歩行法であり、歩行の安定性向上とシステムレベルでの再編成を目的とする。SPW は Nordic Walking(NW)と外見上は類似するが、力学的目的・制約構造・システムへの作用は根本的に異なる。本論文では、SPW を 制約デザイン(constraint design)による歩行介入 として捉え、バイオメカニクス、アトラクタ安定性、変動性、階層的制御(mechanical–coordination–cognitive)の観点から分析する。
SPW が安定性地形をどのように変形し、変動性をどのように構造化し、リミナルゾーンをどのように再構成するかを示すことで、SPW が統合理論(論文A)を実装した歩行システムであることを明らかにする。
1. 序論(Introduction)
Standard Pole Walking(SPW)は、垂直に近いポールを用いて歩行を補助する日本発の歩行法である。Nordic Walking(NW)と異なり、SPW は 推進力の増大 ではなく 安定性の向上と制約構造の再設計 を目的とする。
本論文では、SPW を以下の観点から分析する。
①バイオメカニクス的効果(COM 安定化・関節負荷の低減)
②アトラクタ安定性の変化(歩行アトラクタの深化)
③変動性の構造化(不要な変動の低減)
④階層的制御への作用(機械層・協調層・認知層)
⑤リミナルゾーンの再構成(切り替え速度の変化)
これらを通じて、SPW が「設計された歩行システム」であることを示す。
2. 背景(Background)
2.1 ヒト歩行のバイオメカニクス
歩行は以下の要素に依存する。
・逆振り子モデル
・重心(COM)制御
・地面反力(GRF)
・受動的ダイナミクス
安定性は、COM が支持基底内に収まる能力に依存する。
2.2 安定性と COM 制御
不安定性は以下の状況で生じる。
・左右揺動の増大
・COM の逸脱
・感覚情報の曖昧化
SPW はこれらの要因を直接的に改善する。
2.3 変動性と協調
健康な歩行には 構造化された変動性 が存在する。 しかし、
・過剰な変動性 → 不安定
・過少な変動性 → 硬直
SPW は 不要な変動性を低減しつつ、機能的変動性を保持する。
3. SPW を制約デザイン介入として捉える
 4. バイオメカニクス分析(Biomechanical Analysis)
4. バイオメカニクス分析(Biomechanical Analysis)
4.1 COM 安定化

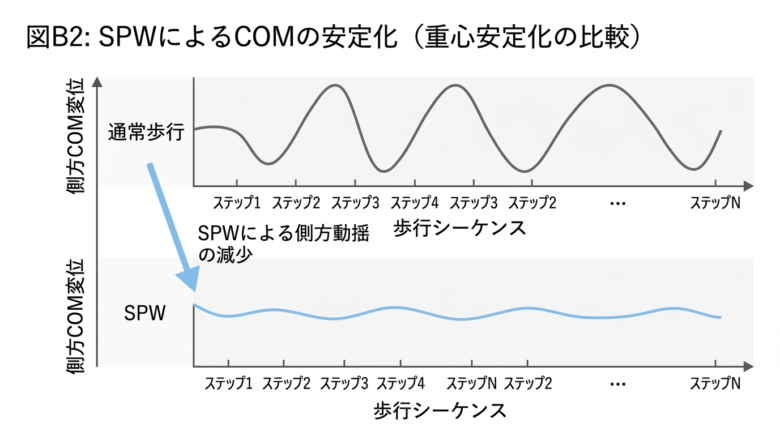 図B2. SPW による重心(COM)左右揺動の低減。
図B2. SPW による重心(COM)左右揺動の低減。
本図は、通常歩行と SPW における左右方向の COM 軌道を比較したものである。 通常歩行では左右揺動が大きく、バランス調整の負荷が高い。一方 SPW では、垂直支持点の追加により揺動が抑制され、より滑らかで予測可能な COM 軌道となる。これは変動性の低減とバランス自信の向上に寄与する。
4.2 関節負荷の低減
 4.3 地面反力(GRF)の変化
4.3 地面反力(GRF)の変化
 5. システムダイナミクス(System Dynamics)
5. システムダイナミクス(System Dynamics)
5.1 アトラクタ地形の変形

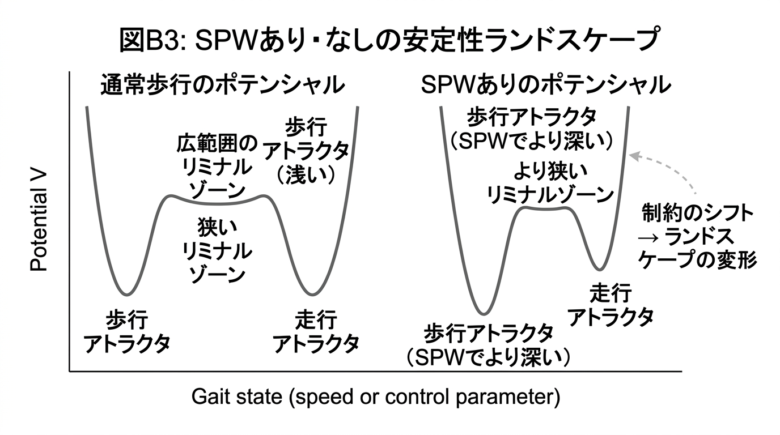 図B3. SPW による安定性地形の変形。
図B3. SPW による安定性地形の変形。
本図は、SPW が歩行のアトラクタ地形をどのように変形させるかを示す。 通常歩行では歩行アトラクタは中程度の深さで、リミナルゾーンは比較的広い。SPW を用いると歩行アトラクタはより深く安定し、リミナルゾーンは狭くなる。これにより、SPW は切り替えの発生を遅らせ、安全に歩行できる速度範囲を拡大する。
5.2 変動性の調整
 特に:
特に:
・左右揺動
・ステップタイミング
・体幹回旋
で顕著である。
5.3 リミナルゾーンの再構成
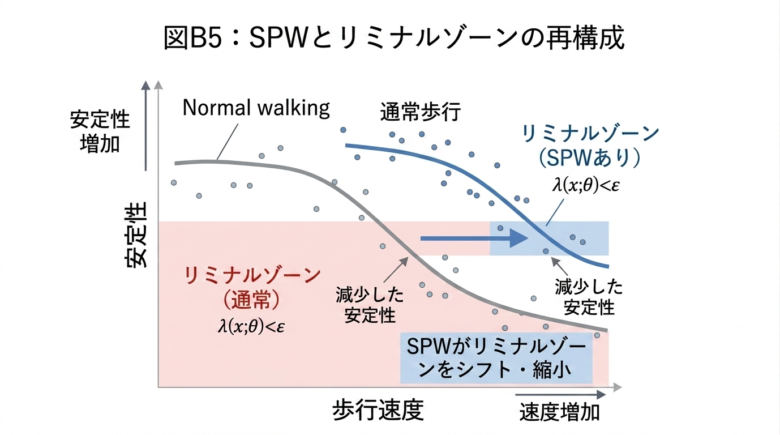 図B5. SPW によるリミナルゾーンの速度依存的再構成。
図B5. SPW によるリミナルゾーンの速度依存的再構成。
本図は、歩行速度に対する安定性の変化を、通常歩行と SPW で比較したものである。 通常歩行では速度上昇とともに安定性が低下し、広いリミナルゾーンが形成される。SPW では全体的な安定性が高まり、リミナルゾーンは高速度側へシフトし、幅も狭くなる。これにより、SPW は歩行の頑健性を高め、変動性駆動の切り替え発生を抑制する。
6. 階層的制御(Hierarchical Control Analysis)
SPW は三層すべてに作用する。
6.1 低次(機械層)
・COM 安定化
・関節負荷の低減
・機械的ノイズの減少
6.2 中次(協調層)
・リズムの一貫性向上
・左右交互性の安定
・協調変動性の低減
6.3 高次(認知・知覚層)
・転倒不安の軽減
・感覚手がかりの明瞭化
・認知負荷の低減

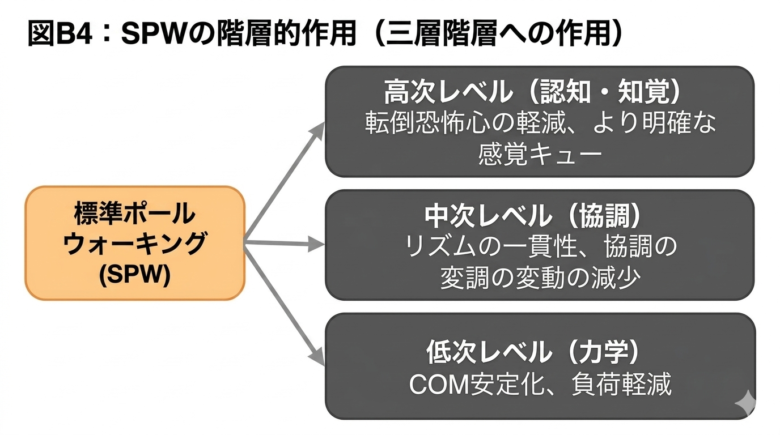 図B4. SPW の三層階層(機械・協調・認知)への作用。
図B4. SPW の三層階層(機械・協調・認知)への作用。
SPW は歩行制御の三層すべてに影響を及ぼす。 低次(機械層)では COM 安定化と関節負荷の低減、 中次(協調層)ではリズムの一貫性向上と不要な協調変動の低減、 高次(認知・知覚層)では転倒不安の軽減と感覚手がかりの明瞭化が生じる。 これらは SPW が単なる補助具ではなく、「多層的な介入システム」であることを示す。
7.Nordic Walking との比較
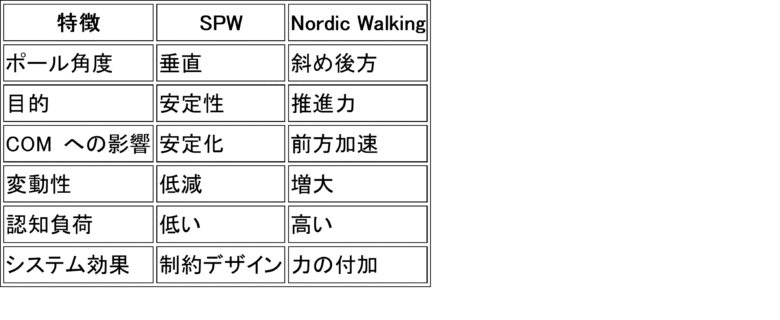
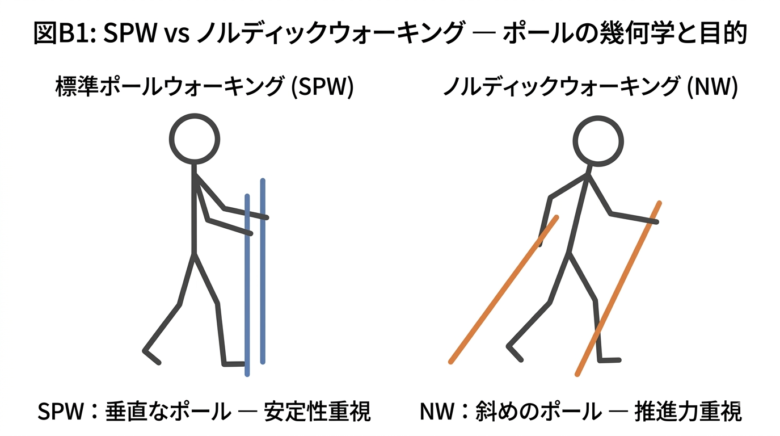 図B1. SPW とノルディックウォーキングのポール角度と機能目的の比較。
図B1. SPW とノルディックウォーキングのポール角度と機能目的の比較。
本図は、Standard Pole Walking(SPW)と Nordic Walking(NW)のポール配置と機能的目的の違いを示す。 SPW は身体の近くに垂直に近いポールを配置し、安定性向上と機械的ノイズの低減を目的とする。一方、NW は斜め後方にポールを突き、推進力の増大を目的とする。SPW は「安定性を設計する制約介入」であり、NW は「力を付加する推進技法」である点が対照的である。
 8. 応用(Applications)
8. 応用(Applications)
8.1 リハビリテーション
・バランス障害
・脳卒中後歩行
・高齢者の転倒予防
8.2 臨床歩行トレーニング
・変動性の構造化
・感覚手がかりの提供
・関節負荷の軽減
8.3 日常生活での応用
・高齢者
・バランス低下者
・回復期の歩行訓練
9. 結論(Conclusion)
SPW は、制約構造を再設計することで歩行を再編成する 設計された歩行システム である。 安定性地形の変形、変動性の調整、リミナルゾーンの再構成、階層的制御への作用を通じて、歩行の安全性と効率を高める。
本論文は、論文Aで提示した統合理論が、SPW という実践的介入にどのように適用されるかを示した。