歩行・切り替え・変動性・Standard Pole Walking(Japanee method):SPW を統合的に理解するための入口
1. このサイトが提供するもの(Overview)
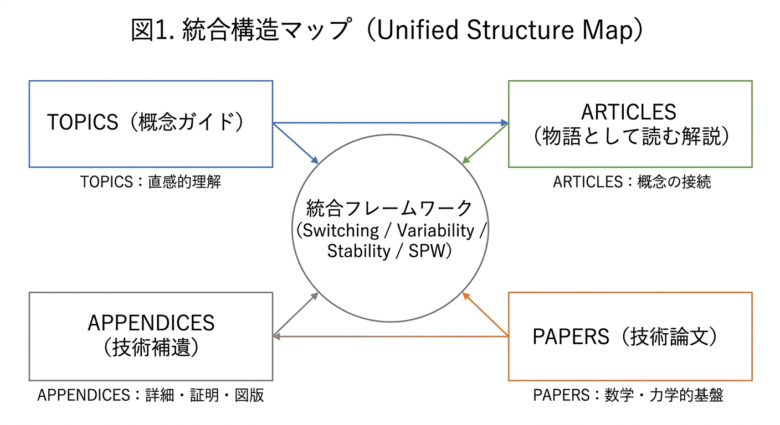 このサイトは、 歩行・切り替え(switching)・変動性(variability)・安定性(stability)・そして スタンダード・ポールウォーキング(SPW) を一つの統合的枠組みとして理解するための体系的なガイドです。
このサイトは、 歩行・切り替え(switching)・変動性(variability)・安定性(stability)・そして スタンダード・ポールウォーキング(SPW) を一つの統合的枠組みとして理解するための体系的なガイドです。
読者は、以下の複数のレベルから自分に合った深さで学ぶことができます:
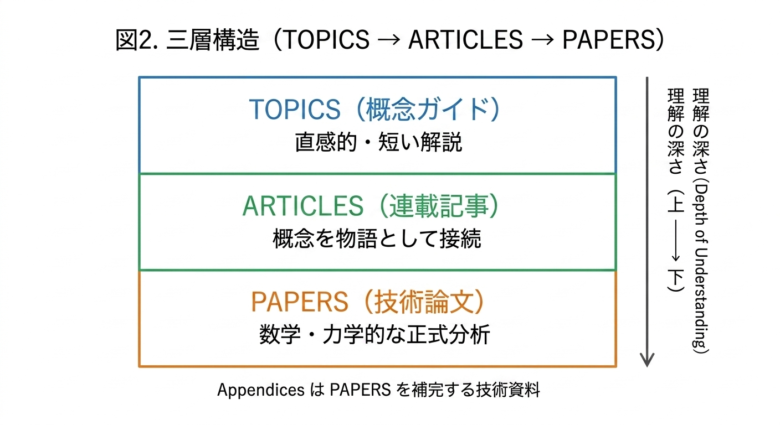
• 直感的に理解できる 概念ガイド(TOPICS)
• 物語として読める 連載記事(ARTICLES)
• 数学的・力学的に厳密な 技術論文(PAPERS)
この 3 層構造によって、 初心者から専門家まで、必要な深さで読み進められるように設計されています。
2. 統合フレームワークの構成要素
この枠組みは、以下の領域を統合しています:
• 歩行 ↔ 走行の 切り替えダイナミクス
• 変動性(variability)と安定性(stability)
• 制約ベース最適化(constraint-based optimization)
• SCAN(Somatic–Cognitive–Action–Navigation)
• SPW のバイオメカニクスとシステムダイナミクス
これらを一つの “物語” として理解できるように整理しています。
3.フレームワークを読み進める 3 つの方法
 読者は、以下の 3 つのルートから学習を進められます。
読者は、以下の 3 つのルートから学習を進められます。
A. TOPICS – 概念の基礎(Conceptual Foundations)
短く、直感的に理解できる解説集です。
扱うテーマ:
• リミナルゾーン(liminal zone)
• アトラクター地形(attractor landscape)
• 変動性と安定性
• 制約ベースの運動
• SCAN ループ
• COM 制御
• SPW の設計思想
数学的な詳細を避け、 「まずは全体像をつかみたい」 読者に最適です。
→ Topics(日本語版) へのアクセスリンクは、こちら
B. ARTICLES – 物語として読む解説(Narrative Explanations)
概念をつなぎ合わせ、 “なぜそうなるのか” を物語として理解できる長文記事です。
例:
• なぜ歩行から走行へ切り替わるのか
• 変動性はなぜ「探索」として働くのか
• SPW はどのように安定性を再構成するのか
• 制約はどのように運動を形づくるのか
• 知覚・認知・行為はどのように相互作用するのか
概念と技術論文の “橋渡し” をする層です。
→ Articles (日本語版)へのアクセスリンクは、こちら
C. PAPERS – 技術的基盤(Technical Foundations)
数学・力学・システム理論に基づく正式な技術論文です。
Paper A :切り替えと変動性の統合理論
リミナルゾーン、アトラクター安定性、変動性駆動の遷移を 数学的・システム論的に定式化。
Paper B :スタンダード・ポールウォーキングのバイオメカニックスとシステム・ダイナミックス
SPW の力学的構造、COM 安定化、変動性の調整、階層制御を分析。
なお、Paper A の Appendices(技術補遺)は、 数学的証明、パラメータ定義、拡張図版、SCAN の形式化などを収録。
→ Papers へのアクセスリンクは、下記「6. 技術論文(Papers)へのリンク」からどうぞ。
4. 推奨される読み進め方(Recommended Pathways)
読者の背景に応じて、以下の 3 つのルートを推奨します。
ルート 1 – 概念から入る(Conceptual First)
1. TOPICS
2. ARTICLES
3. PAPERS
4. APPENDICES(必要に応じて)
直感 → 物語 → 技術 の順で理解したい読者向け。
ルート 2 – 技術から入る(Technical First)
1. PAPERS
2. APPENDICES
3. ARTICLES
4. TOPICS
バイオメカニクス・システム理論・応用数学の背景を持つ読者向け。
ルート 3 – SPW に特化(SPW Focused)
1. TOPICS:SPW 概要
2. ARTICLES:SPW の物語
3. PAPER B
4. Appendix A–D(SPW 関連の技術補遺)
SPW を中心に理解したい読者向け。
5. Standard Pole Walking(Japanese metho):SPW とは
SPW は日本で開発された運動システムで、 ほぼ垂直に近いポール を用いることで:
• 安定性を高め
• 機械的ノイズを減らし
• 感覚手がかりを明瞭化する
という特徴を持ちます。
推進力を重視する Nordic Walking とは根本的に異なり、 安定性と感覚統合を高める “設計された運動システム” として位置づけられます。
SPW は、Paper A で提示した統合理論の 実践的な実装例 として機能します。
6. 技術論文(Papers)へのリンク
• Paper A – 統合切り替え理論
• Paper B – SPW のバイオメカニクスとシステムダイナミクス
→ Paper A (日本語版)へのアクセスリンクは、こちらから
→ Paper B (日本語版)へのアクセスリンクは、こちらから
7. 技術補遺(Appendices)
技術論文Aを補完する追加資料:
• Appendix A – 数学的証明
• Appendix B – パラメータ定義
• Appendix C – 拡張図版(安定性地形・変動性・SCAN)
• Appendix D – SCAN の形式化
→ Appendices (日本語版)へのアクセスリンクは、こちら
8.オリジナルへのリンク
本サイトの元となった「論文・記事・トピックス」へのリンクは、こちらから