連載シリーズ:
切り替えの物語 ― 安定性・変動性・遷移が織りなす歩行システムの統一的理解
1.歩行は「ただの歩き方」ではない
人間の歩行は、一見すると単純で反復的な動作に見えます。 しかし実際には、歩行は 制約・変動性・環境要求に応じて絶えず再編成される動的システム です。
一歩ごとに、身体は安定性と探索、効率と適応のあいだで微妙な調整を行っています。 そして、この調整の中心にある現象が――
切り替え(switching)、すなわち歩行から走行への自発的な遷移です。
このシリーズは、次の問いから始まります。
なぜ人は歩行から走行へ切り替えるのか? そしてその現象は、人間の運動システムの何を示しているのか?
この問いを追うことで、バイオメカニクス・知覚・認知・システムダイナミクスを統合する枠組みが見えてきます。
2.切り替えは「速度の問題」ではない
 歩行から走行への切り替えは、単に速度が上がったから起こるわけではありません。 それは システム全体の再編成(system level reorganization) です。
歩行から走行への切り替えは、単に速度が上がったから起こるわけではありません。 それは システム全体の再編成(system level reorganization) です。
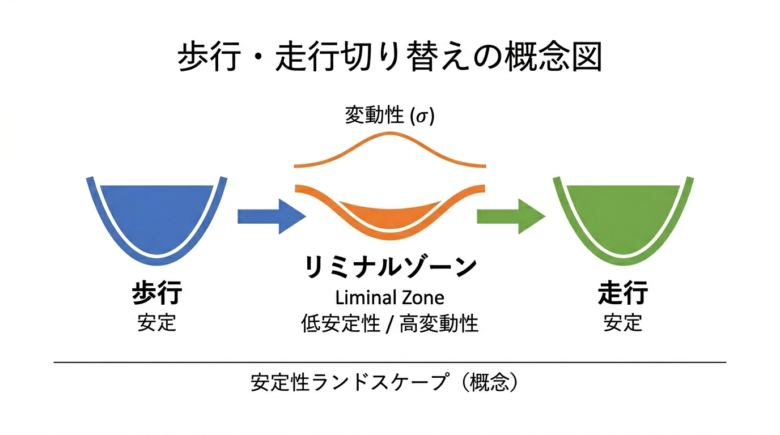
歩行が特定の制約下で非効率・不安定になると、 システムは新しい安定解(アトラクタ)である走行へと移行します。
この遷移は、次のような深層メカニズムを明らかにします。
• 変動性の扱い方
• 制約が運動をどう形づくるか
• 知覚と認知が行動にどう影響するか
• 安定性の地形(stability landscape)がどう変化するか
切り替えは、人間の運動システムの本質を映し出す“窓”なのです。
3.変動性とリミナルゾーンの役割
健康な歩行は、決して硬直したパターンではありません。 そこには 構造化された変動性(structured variability) が存在し、 微小な揺らぎが適応性を支えています。
しかし変動性が一定の閾値を超えると、システムは リミナルゾーン(境界領域) に入ります。 ここでは歩行が不安定になり、走行が魅力的になり始めます。
この領域では:
• ステップタイミングが揺らぐ
• 重心軌道が不安定化する
• 代謝コストが上昇する
• 感覚的手がかりが曖昧になる
システムは複数の運動様式を“試し”、切り替えが可能になります。
4.SCAN・制約・階層化による統一的理解
切り替えを理解するには、複数の理論を統合する視点が必要です。
• SCAN(Somato Cognitive Action Network)
知覚・認知・行動の相互作用を説明する枠組み。
• 制約ベース最適化(constraint based optimization)
運動がリアルタイムの問題解決として生まれることを示す。
• 階層構造(hierarchical organization)
低次のバイオメカニクスと高次の戦略がどのように協調するか。
これらを組み合わせると、歩行は 多層的で自己組織化するシステム として理解できます。
5.スタンダード・ポールウォーキングが示すもの
Standard Pole Walking (Japanese Method) :SPW(スタンダード・ポールウォーキング(日本式))は、 この統一的枠組みを“実践の中で観察できる”貴重な例です。
垂直に近いポール操作を加えるだけで:
• 安定性が再編成され
• 変動性が整えられ
• 切り替え行動が変化し
• 認知負荷が軽減され
• 新しい最適解が生まれる
SPW は単なる技術ではなく、 歩行システムの構造を可視化する「設計された運動システム」 なのです。
6.このシリーズで扱う内容
本シリーズでは、次のテーマを順に扱います。
• 歩行と走行がどのように安定解として生まれるか
• 変動性が適応性をどう支えるか
• 制約が運動パターンをどう形づくるか
• 切り替えがシステム再編成としてどう起こるか
• スタンダード・ポールウォーキングがこれらをどう体現するか
各記事は前の記事を土台にしながら、 歩行システムの統一的理解へと読者を導きます。
7.読者への招待
このシリーズは、研究者、臨床家、実践者、そして 「人間の動きの仕組みを深く理解したい」と願うすべての読者のために書かれています。
歩行がなぜある瞬間に不安定に感じられるのか。 切り替えはなぜ起こるのか。 ポールのような単純な道具が、なぜ運動システム全体を変えるのか。
もしこうした問いに興味があるなら、 あなたはすでにこの物語の入口に立っています。
さあ、切り替えの物語 を始めましょう。
***連載シリーズ各ページへのリンク***
→ 連載シリーズ Index