Article 3(日本語版)
制約ベース最適化としての歩行
身体はどのように「最適な解」をリアルタイムで見つけているのか
1.はじめに:歩行は問題解決である
私たちが一歩踏み出すたびに、身体はある問題を解いています。
その問題とは:
「現在の制約のもとで、どうすれば効率的かつ安定して前に進めるか?」
制約には次のようなものがあります。
• 重力
• 関節可動域
• 筋力
• 感覚ノイズ
• 地面の状態
• 疲労
• 要求される速度
歩行はあらかじめ決められたパターンではありません。 制約の中で最適解を探し続けるリアルタイムの最適化プロセス です。
2.制約とは何か?
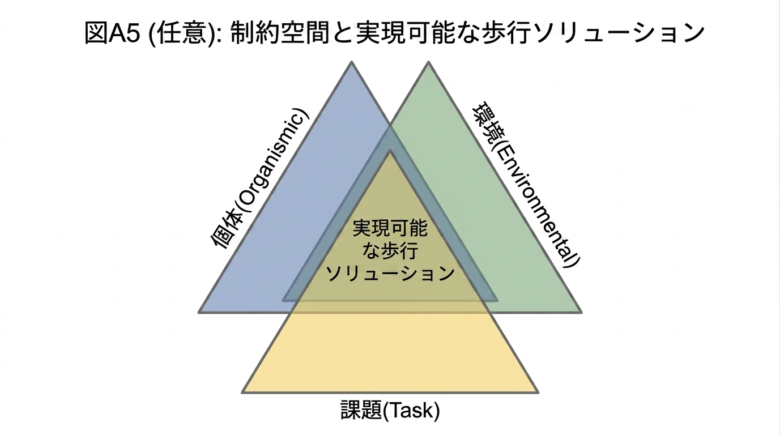 制約とは、運動を形づくる条件のことです。 大きく分けて三種類あります。
制約とは、運動を形づくる条件のことです。 大きく分けて三種類あります。
• 身体的制約(Organismic) 体格、筋力、柔軟性、感覚能力
• 環境的制約(Environmental) 地面、傾斜、障害物、天候
• 課題的制約(Task) 速度、方向、荷物、意図
制約は動きを“制限”するのではなく、 動きを“定義”する ものです。
3.計算ではなく「探索」による最適化
人間は最適解を計算して歩いているわけではありません。 最適化は次の相互作用から自然に生まれます。
• バイオメカニクス
• 知覚
• 神経制御
• 変動性
身体は微小な揺らぎを使って「試行錯誤」を行います。 効率が上がる揺らぎは強化され、 効率が下がる揺らぎは捨てられます。
これは 計算ではなく探索による最適化 です。
4.アトラクタは「最適解」である
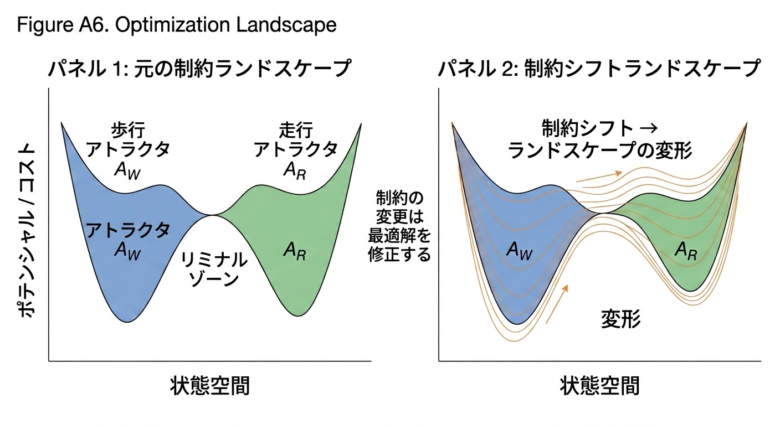 歩行や走行といった安定パターン(アトラクタ)は、 特定の制約下での 最適解 です。
歩行や走行といった安定パターン(アトラクタ)は、 特定の制約下での 最適解 です。
• 低速では歩行が最も効率的
• 高速では走行が最も効率的
制約が変われば、最適解も変わります。 そのときシステムは再編成されます。
5.変動性は「探索のメカニズム」である
変動性は、システムが解空間を探索するための道具です。
安定しているときは変動性は少なく構造化されています。 制約が変わると変動性が増え、システムは:
• 代替パターンを試し
• 安定性を評価し
• 環境変化を検知し
• 切り替えの準備をする
こうしてリミナルゾーンでは変動性が増加します。
6.スタンダード・ポールウォーキングが最適化をどう変えるか
スタンダード・ポールウォーキング(日本式)は、歩行の制約を再設計します。
垂直に近いポールを加えることで:
• 追加の支持点が生まれ
• 下肢の負荷が減り
• 重心が安定し
• 感覚入力が明瞭になり
• 不必要な変動性が減る
これにより、歩行は 新しい最適解 へと変わります。
SPW は単なる技術ではなく、 制約をデザインする介入 なのです。
7.まとめ:最適化は歩行の隠れた論理である
歩行は固定パターンではなく、制約との対話です。 変動性・知覚・再編成を通じて、身体は最適解をリアルタイムで見つけています。
制約ベース最適化の視点から見ると:
• なぜ遷移が起こるのか
• なぜ変動性が重要なのか
• 安定性がどう生まれるのか
• ポールが歩行をどう再編成するのか
が一つの枠組みで理解できます。
この視点は、次の記事で扱う 階層構造(hierarchy) の理解へとつながります。
***連載シリーズ各ページへのリンク***
→ 連載シリーズ Index
→ Opening Article
→ Article 1
→ Article 2