Article 4(日本語版)
階層構造と再編成としての歩行
多層的な制御が安定性と切り替えをどのように生み出すのか
1.はじめに:運動は「層」で起こる
人間の運動は、単一のメカニズムで制御されているわけではありません。 反射から認知まで、複数の層が協調して動きを生み出します。
歩行は、次のような層が重なり合う 階層システム です。
• 反射・筋骨格レベル
• 協調・リズムレベル
• 認知・知覚レベル
この階層構造を理解することは、 安定性・適応・切り替えの仕組みを理解するための鍵になります。
2.歩行制御の三つの層
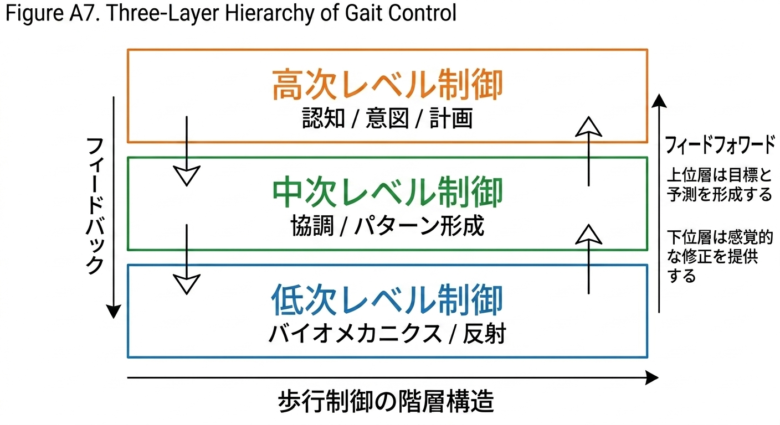 複雑なシステムを理解しやすくするため、歩行を三つの層に整理します。
複雑なシステムを理解しやすくするため、歩行を三つの層に整理します。
1.低次レベル(バイオメカニクス)
• 関節力学
• 筋特性
• 床反力
• 受動的ダイナミクス
身体の物理的基盤を担います。
2.中間レベル(協調パターン)
• 左右交互運動
• タイミング
• リズム生成
歩行のパターンを組み立てる層です。
3.高次レベル(認知・知覚)
• バランス戦略
• 努力感の評価
• 注意・意図
• 切り替え判断
状況を解釈し、目標を設定する層です。
これらは 入れ子構造(nested hierarchy) を形成し、 上位層が目標を設定し、下位層が実装します。
3.安定性は「層の協調」から生まれる
安定性はどれか一つの層が作るものではありません。 層同士の協調 から生まれます。
例:
• 低次レベルが重心を安定化
• 中間レベルがリズムを維持
• 高次レベルがバランスを監視
どれかの層が負荷を受けると、他の層が補償します。 これが人間が多様な環境で歩ける理由です。
4.再編成:階層が組み替わる瞬間
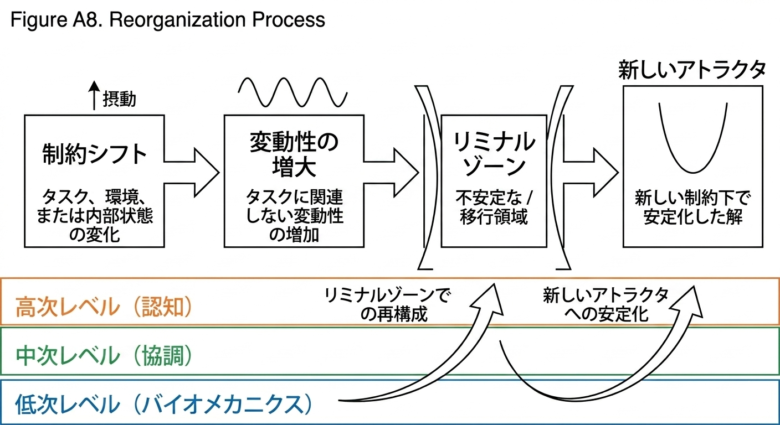 制約が変わると、階層は 再編成(reorganization) を起こします。
制約が変わると、階層は 再編成(reorganization) を起こします。
例:
• 速度が上がると中間レベルの協調が不安定化
• 高次レベルが努力感と変動性の増加を検知
• 低次レベルの力学が歩行に不利になる
こうしてシステムは新しいアトラクタ(走行)へ移行します。
再編成は失敗ではなく、 効率と安定性を保つための適応 です。
5.変動性は「層をつなぐメッセンジャー」
変動性は、階層間の情報伝達を担います。
• 低次レベルの変動性 → 力学的不安定の兆候
• 中間レベルの変動性 → リズムの崩れ
• 高次レベルの変動性 → 知覚的不確実性
変動性が増えると、システムは リミナルゾーン に入り、再編成が起こりやすくなります。
6.スタンダード・ポールウォーキングが階層をどう変えるか
スタンダード・ポールウォーキング(日本式)は、三つの層すべてに作用します。
低次レベル
• 重心の安定化
• 関節負荷の軽減
• 追加の支持点
中間レベル
• リズムの安定
• 不必要な変動性の抑制
• 左右交互運動の強化
高次レベル
• 認知負荷の軽減
• 安定感の向上
• 感覚的手がかりの明瞭化
SPW は階層全体を再編成し、 切り替えの条件そのものを変えます。
7.まとめ:階層構造は歩行の隠れた建築である
歩行は多層的で適応的なシステムです。 切り替えは、階層が制約に応じて再編成されるときに起こります。
階層構造を理解することで:
• 安定性の源
• 変動性の役割
• 遷移の仕組み
• ポールによる再編成
が一つの枠組みで説明できます。
次の記事では、これらの原理がどのように スタンダード・ポールウォーキングという「設計された歩行システム」 に結実するかを扱います。
***連載シリーズ各ページへのリンク***
→ 連載シリーズ Index
→ Opening Article
→ Article 1
→ Article 2
→ Article 3