Article 5
スタンダード・ポールウォーキングは「設計された歩行システム」である
シンプルな道具が、安定性・変動性・切り替えを再編成する
1.はじめに:道具がシステムを照らし出す
スタンダード・ポールウォーキング(日本式)は、一見すると単純です。 垂直に近いポールを持って歩くだけ。
しかし、このシンプルさの背後には重要な洞察があります。
わずかな制約の変更が、運動システム全体を再編成する。
SPW は単なる技術ではありません。 安定性・変動性・知覚・切り替えを再構成する「設計された歩行システム」 です。
SPW を観察すると、歩行システムの隠れた構造が驚くほど鮮明に見えてきます。
2.SPW を支える三つの設計原理
 SPW は次の三つの原理に基づいています。
SPW は次の三つの原理に基づいています。
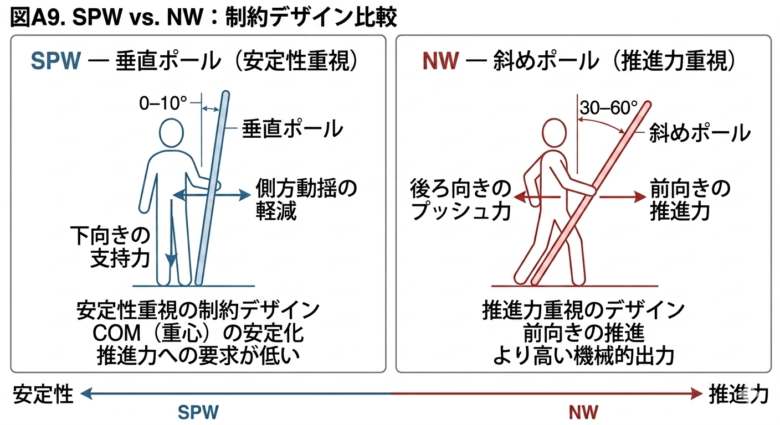
1.垂直支持による安定性の確保
ポールを垂直に近く使い、予測可能な支持点を提供する。
2.推進ではなくバランスを目的とする
ノルディックウォーキングのように押し出さない。 目的は速度ではなく安定性。
3.制約による再編成を促す
外部制約としてポールを用い、システムをより安全で効率的な解へ導く。
これらが SPW を独自の歩行システムにしています。
3.SPW が安定性をどう再構成するか
安定性は SPW の中心テーマです。
垂直ポールは:
• 左右の揺れを抑え
• 重心軌道を安定化し
• 予測可能な支持点を提供し
• バランス維持の認知負荷を軽減する
これにより、より安全で滑らかな歩行が可能になります。
4.SPW が変動性をどう整えるか
SPW は変動性を「消す」のではなく、整える 方向に働きます。
ポールは:
• 不必要な揺らぎを抑え
• リズムを安定させ
• 微小な調整の混乱を減らし
• 安定したアトラクタを形成する
この構造化された変動性は、リハビリや歩行トレーニングに理想的です。
5.SPW が切り替え行動に与える影響
SPW は歩行・走行の切り替えメカニズムにも作用します。
重心の安定化と代謝コストの低減により:
• 早期切り替えを防ぎ
• 感覚的手がかりを明瞭にし
• SCAN のノイズを減らし
• 安全に歩ける速度範囲を広げる
SPW は リミナルゾーンの形状そのものを変える のです。
6.SPW は階層全体に作用する
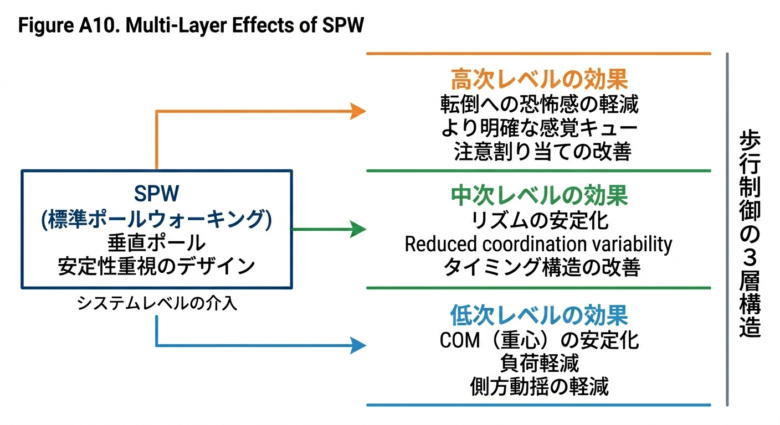 SPW は歩行の三つの層すべてに影響します。
SPW は歩行の三つの層すべてに影響します。
低次レベル(バイオメカニクス)
• 重心の安定化
• 関節負荷の軽減
• 追加の支持点
中間レベル(協調パターン)
• リズムの安定
• 不必要な変動性の抑制
• 左右交互運動の強化
高次レベル(認知・知覚)
• 認知負荷の軽減
• 安定感の向上
• 感覚的手がかりの明瞭化
SPW は階層全体を再編成するため、 歩行ダイナミクスが根本から変わります。
7.SPW が「設計されたシステム」である理由
SPW は次の原理を体現しています。
• 制約ベース最適化
• 階層的制御
• 構造化された変動性
• 知覚・認知・行動の統合
これは偶然ではなく、 人間の歩行システムの論理に基づいた設計 です。
SPW は「動きを強制する」のではなく、 制約を調整することでシステム全体を再編成する のです。
8.まとめ:SPW は歩行システムの構造を可視化する
スタンダード・ポールウォーキングは、実践的な道具であると同時に、 歩行システムの本質を示す 生きたモデル です。
• 安定性がどう生まれるか
• 変動性がどう整えられるか
• 切り替えがどう起こるか
• 制約がどう最適化を導くか
• 知覚と行動がどう統合されるか
SPW を通じて、歩行の隠れた構造が鮮明に見えてきます。
SPW は技術ではなく、 科学に基づいて設計された歩行システム なのです。
*****Article5のAppendix****
📘 Appendix Text — SPW as a System-Level Intervention
Standard Pole Walking(SPW)は、単一の身体部位や単一の制御層に作用する介入ではなく、 歩行制御の Low / Mid / High の三層すべてに同時に影響を与える “system-level intervention” として位置づけられる。
SPW の特徴である vertical pole(垂直ポール) は、 身体の外部に安定性を付与する constraint(外部拘束) として機能し、 その効果は以下の 3 層に階層横断的に伝播する。
1. Low-Level(Biomechanical)への作用
Low-level は身体の物理的安定性と反射的制御を担う層であり、 SPW はここに最も直接的に作用する。
• COM stabilization(重心安定化)
垂直ポールが外部支持点として働き、重心の横揺れを抑制する。
• Load reduction(荷重軽減)
上肢による支持が下肢の負担を軽減し、歩行周期の安定性を高める。
• Reduced lateral sway(左右揺動の減少)
これにより、歩行の基本的安定性が向上し、 liminal zone への移行時の揺らぎが抑制される。
Low-level の改善は、 functional integrity の基盤を強化する。
2. Mid-Level(Coordinative)への作用
Mid-level はリズム・タイミング・協調性を司る層であり、 SPW の安定化効果はここに 間接的だが強力な影響 を与える。
• Rhythm stabilization(リズム安定化)
COM の揺れが減ることで、歩行周期のリズムが整う。
• Timing structure(タイミング構造の改善)
上肢と下肢の協調が取りやすくなり、 歩行のタイミングがより一貫したものになる。
• Reduced coordination variability(協調性の変動性の減少)
これにより、歩行の “pattern formation” が強化される。
Mid-level の改善は、 functional quality の向上に直結する。
3. High-Level(Cognitive–Perceptual)への作用
High-level は注意・知覚・意図といった上位制御を担う層であり、 SPW はここにも明確な効果をもたらす。
• Fear-of-falling reduction(転倒不安の低減)
外部支持点の存在が心理的安定性を高める。
• Sensory cue clarity(感覚手がかりの明瞭化)
ポール接触による触覚・固有感覚が、身体位置の知覚を補強する。
• Attentional allocation(注意配分の改善)
安定性が向上することで、注意資源を歩行以外のタスクに割ける。
High-level の改善は、 歩行の柔軟性(adaptability)と戦略的制御 を高める。
4. System-Level Intervention としての統合的効果
SPW の最大の特徴は、 Low → Mid → High の三層に “同時に” 作用する点 にある。
• Low-level の安定化が
• Mid-level の協調性を改善し
• High-level の認知的負荷を軽減する
という 階層横断的な連鎖効果 が生じる。
この構造は、SPW が単なる歩行補助ではなく、 歩行制御システム全体を再編成する介入(system-level intervention) であることを示している。
5. Appendix 図(Figure S4)との対応
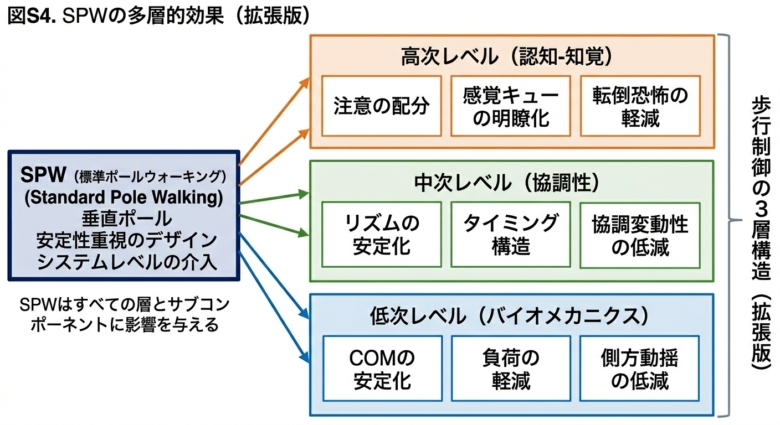 Appendix 図 S4 は、 SPW の作用が三層の sub-components にどのように届くかを 視覚的に示したものである。
Appendix 図 S4 は、 SPW の作用が三層の sub-components にどのように届くかを 視覚的に示したものである。
• Low-level:COM・荷重・揺動
• Mid-level:リズム・タイミング・協調性
• High-level:注意・知覚・心理的安定性
これらが SPW からの矢印で直接結ばれる構造 は、 SPW の介入が 階層横断的であることの決定的証拠 となる。
***連載シリーズ各ページへのリンク***
→ 連載シリーズ Index
→ Opening Article
→ Article 1
→ Article 2
→ Article 3
→ Article 4