TOPICS(日本語版):
スタンダードポールウォーキングの主要テーマと研究の方向性
**本サイトの日本語コンテンツ(TOPICS、記事、論文)の構成や探し方については、「Gateway Page(日本語版)」をご覧ください。 → ゲートウェイページへのリンク**
本ページでは、スタンダードポールウォーキング(日本式)に関連する主要なトピック、研究課題、および概念的な基盤について概説します。また、詳細な解説記事、比較資料、そして歩行の切り替え、変動性、システムダイナミクスに関する連載シリーズ記事1~5へのハブとしての役割も果たします。
1. スタンダードポールウォーキングの研究トピック
現在展開している主要な研究テーマは以下の通りです。各トピックから詳細ページや記事にアクセスできます。
トピック1:スタンダードポールウォーキングのバイオメカニクスとシステムダイナミクス
ポールを用いた歩行が、どのように安定性、荷重配分、切り替え行動を変化させるか。 → トピック1へのリンク
これらの概念の物語的な導入については、連載シリーズの「記事1」をご覧ください。 → 「記事1 – 歩行と走行の境界について」へリンク
トピック2:ヒト歩行における切り替えメカニズム — 変動性、制約、リミナルゾーン
歩行と走行の遷移を理解するための統一フレームワーク。 → トピック2へのリンク
変動性とSCANに関するストーリーベースの解説は、連載シリーズの「記事2」をご覧ください。 → 「記事2 – 変動性、安定性、およびSCANフレームワーク」へリンク
トピック3:歩行支援システムのデザイン — 階層性、最適化、および実践的応用
理論モデルから、現実世界のポール歩行技術まで。 → トピック3へのリンク
階層性と最適化に関する探求は、連載シリーズの「記事3」および「記事4」をご覧ください。 → 「記事3」へリンク
2. スタンダードポールウォーキング(日本式)とは?
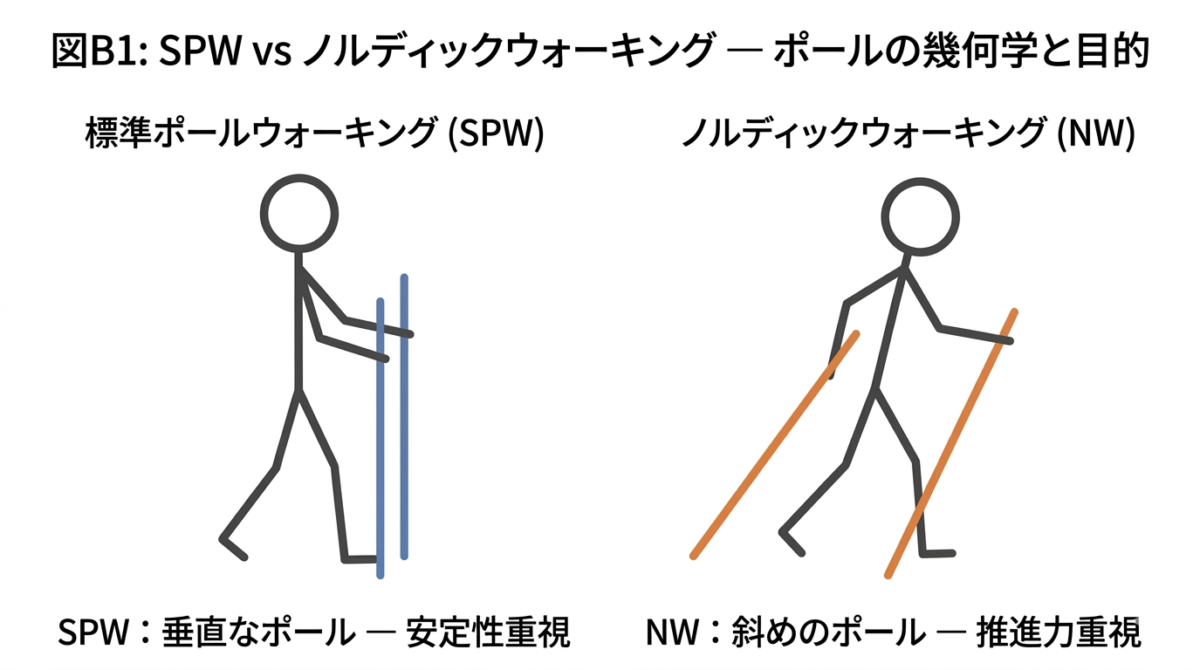
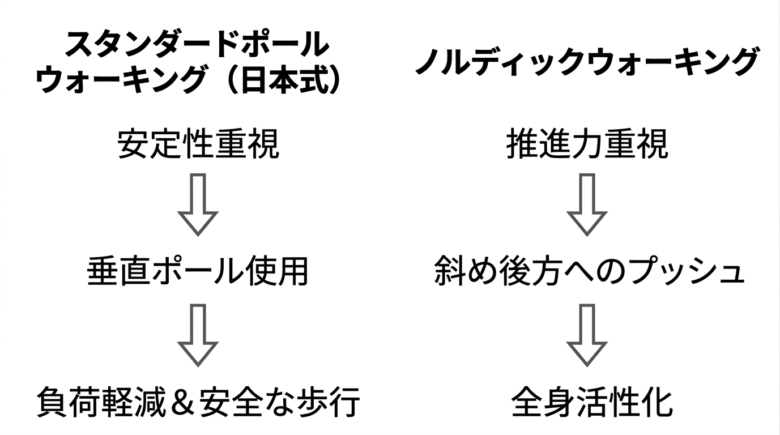
スタンダードポールウォーキングは、ノルディックウォーキングとは根本的に異なる日本式のポール歩行メソッドです。
主な違いは以下の通りです。
• 目的(安定性重視 vs 推進力重視)
• 技術(ポールの角度、タイミング、荷重配分)
• バイオメカニクス的原則
• 背景にある理論的フレームワーク
スタンダードポールウォーキングは、リハビリテーション、歩行改善、転倒予防、そして一般的な健康増進に活用されており、本シリーズで紹介する理論的考察の実践的な基盤となっています。
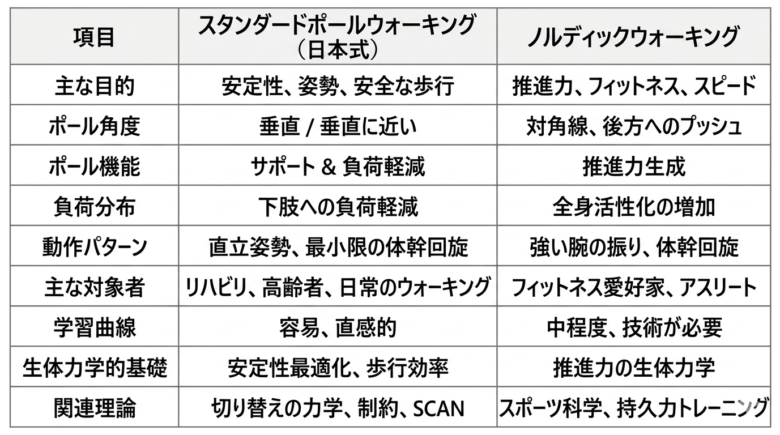
3. 比較:スタンダードポールウォーキング vs ノルディックウォーキング
• A. 概念図
• B. 詳細比較表
4. 背景と理論的基盤
スタンダードポールウォーキングは、より広範な理論的フレームワークと自然に結びついています。
• 切り替えのダイナミクス(歩行 ↔ 走行)
• 変動性とリミナルゾーン(境界領域)
• 制約に基づく最適化
• 階層的再編成
• SCAN(秩序 → 境界 → 秩序)
• 生存システムモデル(ビア)
これらのフレームワークについては、連載シリーズにて詳細に探求しています。
5.「Gateway Page(日本語版)」、「連載シリーズ」および「論文」へのリンク
• 「Gateway Page(日本語版)」へのリンクは、こちらから
•「 連載シリーズ(日本語版)」へのリンクは、こちらから
• 「Paper A – 統合切り替え理論」へは、こちらから
• 「Paper B – SPW のバイオメカニクスとシステムダイナミクス」へは、こちらから
6. 海外の読者の方へ
この「TOPICS- R&D in SPW (日本語版)」ページは、日本国外・国内の読者に向けた明確な出発点となるよう設計されています。連載シリーズで使用される専門用語については、以下の注記をご参照ください。
用語に関する注記
当サイトにおいて「ポールウォーキング(Pole Walking)」という用語は、ノルディックウォーキングとは区別される「スタンダードポールウォーキング(日本式)」を指します。
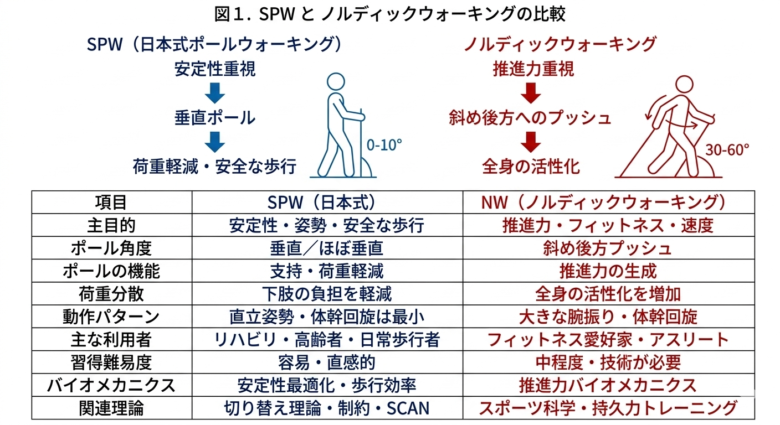 図1. スタンダードポールウォーキング(日本式)とノルディックウォーキングの比較 :
図1. スタンダードポールウォーキング(日本式)とノルディックウォーキングの比較 :
この図は、スタンダードポールウォーキング(日本式)とノルディックウォーキングの概念的・技術的な比較を示しています。上段の図は「目的」における根本的な違いを強調しています。スタンダードポールウォーキングは「安定性」を重視し、垂直に近いポールを使用することで下肢への負荷を軽減し、安全な歩行をサポートします。一方、ノルディックウォーキングは「推進力」を重視し、斜め後ろへのポール突き出しによって全身運動を活性化させます。下段の表は、目的、ポール角度、バイオメカニクス機能、動作パターン、対象ユーザー、理論的基盤における主な違いをまとめたものです。これらを統合することで、両手法がそれぞれ異なる目標と原則を持つ、異なる歩行システムであることが明確になります。