Article 1(日本語版):
歩行と走行の境界を見る
リミナルゾーンが示す、歩行システムの隠れた構造
1.歩行が「歩行らしくなくなる瞬間」
歩いていると、ある瞬間にふと違和感が生まれます。 足取りが重くなり、呼吸が変わり、身体がそっと囁きます。
「そろそろ走ったほうがいいかもしれない」
これは単なる速度の問題ではありません。 歩行が不安定になり、走行が魅力的になり始める リミナルゾーン(境界領域) の入口です。
この領域を理解することは、 歩行を 動的で自己組織化するシステム として捉える第一歩になります。
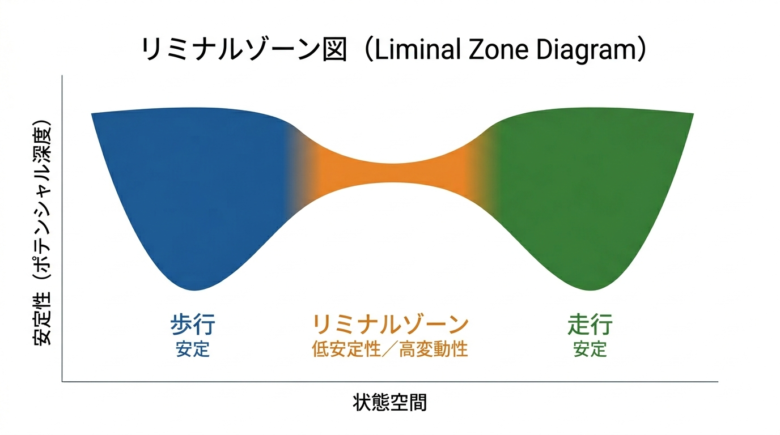
2.歩行と走行は「アトラクタ」である
人間の運動は、機械のように固定ギアで動いているわけではありません。 むしろ、身体が自然に落ち着く 安定パターン(アトラクタ) を持っています。
• 歩行アトラクタ 低速で効率的、安定、低変動性。
• 走行アトラクタ 高速で効率的、リズミカル、弾性的。
その間には、どちらも完全には安定しない領域があります。 それがリミナルゾーンです。
 3.リミナルゾーンで起こること
3.リミナルゾーンで起こること
リミナルゾーンに入ると、身体は「別の動き方」を試し始めます。
典型的には:
• ステップタイミングが揺らぐ
• 重心軌道が不安定化する
• 代謝コストが上昇する
• 努力感が増す
• 感覚的手がかりが曖昧になる
これは失敗ではなく、探索 です。
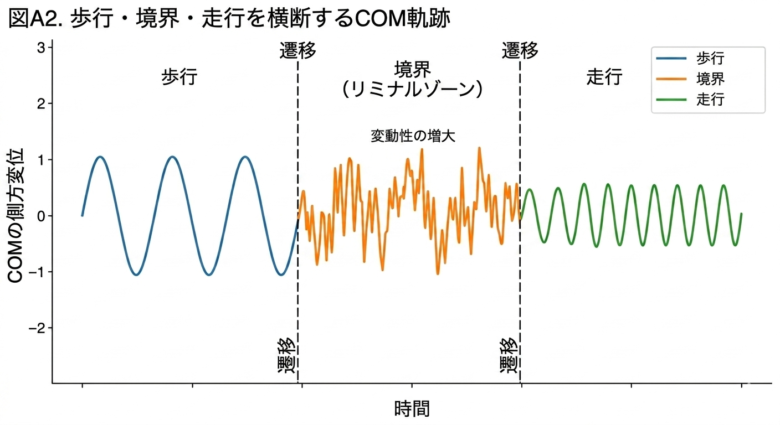 システムはより効率的な解を探すために変動性を増やします。
システムはより効率的な解を探すために変動性を増やします。
4.変動性は「ノイズ」ではなく「探索の道具」
変動性は誤差ではありません。 人間の歩行において変動性は 適応のための道具 です。
変動性はシステムに:
• 現在のアトラクタの安定性を評価させ
• 代替パターンを試させ
• 環境制約に適応させ
• 切り替えの準備をさせる
という役割を果たします。
リミナルゾーンでは、この変動性が特に重要になります。
5.切り替えが起こる理由
歩行から走行への切り替えは、次の条件が揃ったときに起こります。
• 歩行が制約下で非効率になる
• 変動性がより安定した解を示す
• 感覚的手がかりが走行を支持する
• システムが新しいアトラクタへ再編成される
これは意識的な判断ではなく、 システム全体の再構成 によって生じます。
6.スタンダード・ポールウォーキングが境界をどう変えるか
スタンダード・ポールウォーキング(日本式)は、 この境界領域の形状そのものを変えます。
重心を安定させ、不要な変動性を抑えることで:
• 不安定化の開始を遅らせ
• 歩行の代謝コストを下げ
• 感覚的手がかりを明瞭にし
• 早期切り替えを防ぐ
SPW は 安定性の地形(stability landscape)を再設計する のです。
7.まとめ:境界は「システムへの窓」である
歩行と走行の境界は線ではなく、風景(landscape) です。 安定性・変動性・知覚が複雑に絡み合う領域です。
この境界を観察することで、次のことが見えてきます。
• 運動システムがどのように適応するか
• 遷移がどのように生まれるか
• ポールが歩行をどう再編成するか
• 人間がどのように安定性を維持するか
これが、歩行を統一的に理解するための最初のステップです。
***連載シリーズ各ページへのリンク***
→ 連載シリーズ Index
→ Opening Article