Article 3
Constraint Based Optimization in Human Locomotion
How the movement system finds efficient solutions in real time
1. Introduction: Movement as a Problem Solving Process
Every step we take is a solution to a problem.
The problem is simple to describe but complex to solve:
How can the body move forward efficiently while staying stable under current constraints?
These constraints include:
• gravity
• joint limits
• muscle strength
• sensory noise
• terrain
• fatigue
• speed demands
Human gait is not pre programmed. It is a real time optimization process that continuously searches for the most efficient solution within these constraints.
2. What Are Constraints?
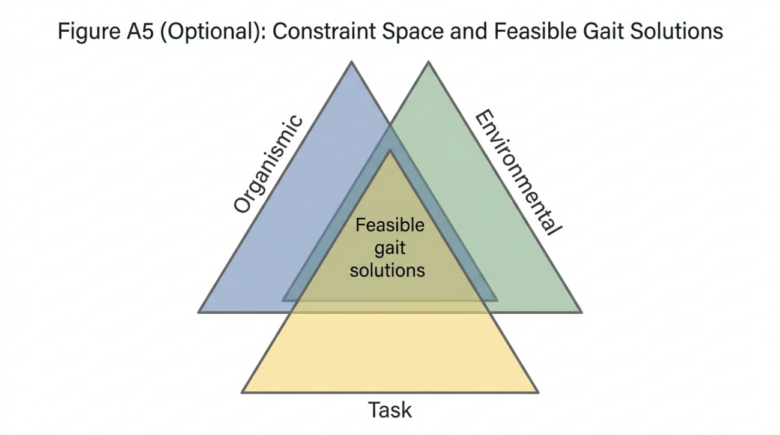 Constraints are the conditions that shape movement. They come in three major types:
Constraints are the conditions that shape movement. They come in three major types:
• Organismic constraints
(body structure, strength, flexibility, sensory capacity)
• Environmental constraints
(ground surface, slope, obstacles, weather)
• Task constraints
(speed, direction, load, intention)
These constraints do not limit movement—they define it.
They determine which movement patterns are possible, efficient, or stable.
3. Optimization Without a Calculator
Humans do not consciously compute optimal solutions. Instead, optimization emerges from the interaction of:
• biomechanics
• perception
• neural control
• variability
The system “tries out” micro variations in movement. If a variation reduces effort or increases stability, it is reinforced. If it increases cost or instability, it is discarded.
This is optimization through exploration, not calculation.
4. Attractors as Optimal Solutions
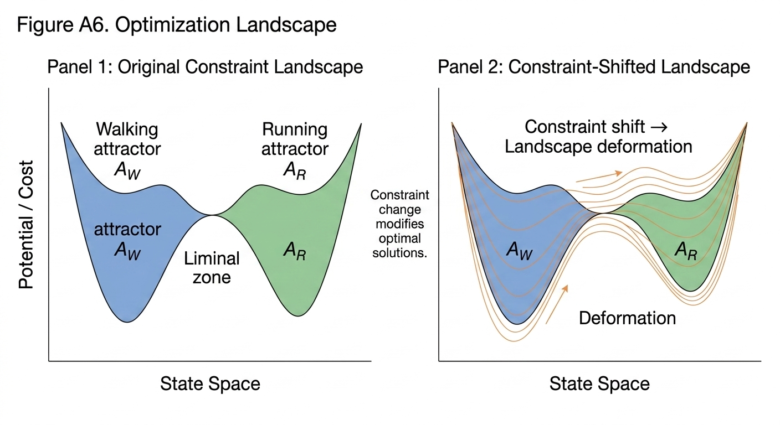 Stable gait patterns—walking and running—are attractors that represent optimal solutions under specific constraints.
Stable gait patterns—walking and running—are attractors that represent optimal solutions under specific constraints.
• At low speeds, walking minimizes energy cost.
• At higher speeds, running becomes more efficient.
The system naturally settles into whichever attractor best satisfies the current constraints.
When constraints change, the optimal solution changes—and the system reorganizes.
5. Variability as the Search Mechanism
Variability is the system’s way of exploring the solution space.
In stable conditions, variability is low and structured. As constraints shift, variability increases, allowing the system to:
• test alternative patterns
• evaluate stability
• sense environmental changes
• prepare for transitions
This is why variability rises in the liminal zone: the system is actively searching for a better solution.
6. How Standard Pole Walking Changes the Optimization Landscape
Standard Pole Walking (Japanese Method) modifies the constraints of gait.
By adding vertical poles, SPW:
• provides additional support points
• reduces load on lower limbs
• stabilizes the center of mass
• clarifies sensory feedback
• reduces unnecessary variability
These changes alter the optimization landscape.
Walking with poles becomes a new optimal solution—one that is safer, more stable, and often more efficient for many individuals.
SPW is therefore not just a technique; it is a constraint design intervention.
7. Conclusion: Optimization as the Hidden Logic of Movement
Human locomotion is not a fixed pattern but a continuous negotiation with constraints. Through variability, perception, and system level reorganization, the body finds efficient solutions in real time.
Understanding gait as constraint based optimization allows us to see:
• why transitions occur
• why variability matters
• how stability emerges
• how tools like poles reshape movement
This perspective forms the foundation for understanding hierarchy and multi layer control in the next article.
*** Link ***
→ Opening Article
→ Article 1
→ Article 2